5.7. Wheelspeed sensor configuration
The user can configure the wheelspeed sensor input by accessing the "Configuration →
Wheelspeed" panel of the web interface. The wheelspeed sensor can be connected to
the UART/TCP or CAN ports. However, before setting up the wheelspeed sensor, the
corresponding ports should be configured according to Section 5.3.
W
hee
lsp
eed
s
e
nsors
P
r
e
s
e
ts
S
e
nsor
1
E
n
ab
l
e
S
e
nsor
2
E
n
ab
l
e
S
e
nsor
3
E
n
ab
l
e
S
e
nsor
4
E
n
ab
l
e
S
e
nsor
5
E
n
ab
l
e
G
e
n
e
r
al
c
on
fig
ur
a
t
i
on
W
hee
lsp
eed
s
ig
n
R
ec
or
d
r
a
w
CAN
S
e
nsors
c
on
fig
ur
a
t
i
on
S
t
a
tus
C
on
fig
ur
a
t
i
on
S
yst
e
m
f
p
-5
cba
80
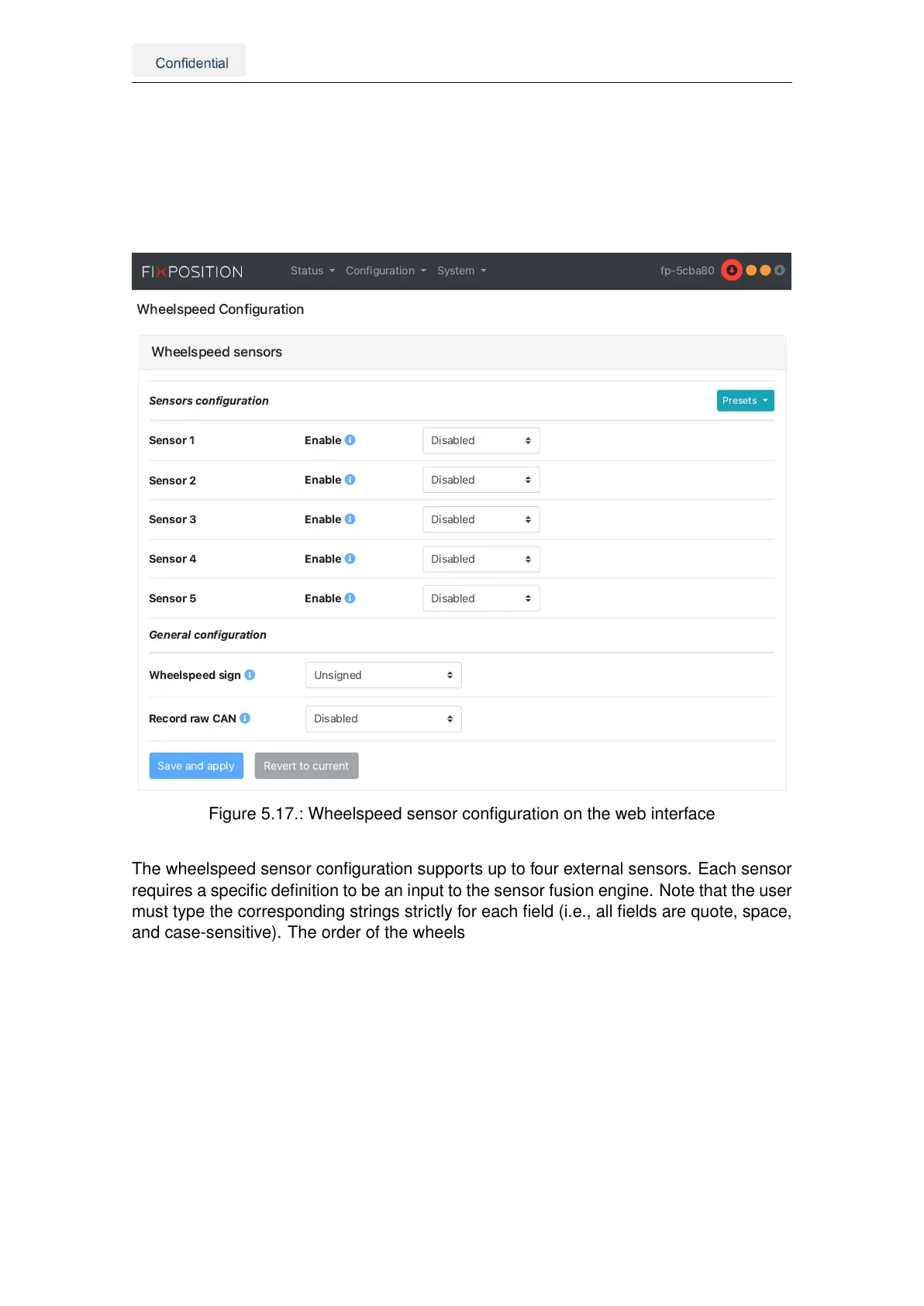
Figure 5.17.: Wheelspeed sensor configuration on the web interface
The wheelspeed sensor configuration supports up to four external sensors. Each sensor
requires a specific definition to be an input to the sensor fusion engine. Note that the user
must type the corresponding strings strictly for each field (i.e., all fields are quote, space,
and case-sensitive). The order of the wheelspeed sensor definition does not matter. The
low-level sensor configuration required by any of the ports involves the following fields:
• Enable – Enables the wheelspeed sensor. If unchecked, the Vision-RTK 2 will not
use any other parameters. It can be left unchecked to keep the configuration saved.
• Name – Reference name for the wheelspeed sensor representing the type of mea-
surement that it will generate. The value must be unique among all enabled sensors.
Depending on the setup, it should be one of the following:
• RC (rear centre) – Rear Centre wheel (Most common case).
• RL (rear left) – Rear Left wheel.
• RR (rear right) – Rear Right wheel.
• FL (front left) – Front Left wheel.
Vision-RTK 2 | Fixposition Positioning Sensor 30