• FR (front right) – Front Right wheel.
• Type - Unique identifier that specifies how to read this particular sensor type. Enter
the string as-is, do not add quotes, spaces, or anything else.
• Device - Specifies the port in use:
• CAN bus – for sensors connected via the CAN interface (see 5.3.2).
• I/O port – for sensors connected via any of the I/O ports (see 5.3.1).
• Reverse – When enabled, the low-level sensor driver inverts the sign of the mea-
surement (Only supported by some sensors).
• Use sensor – When enabled, the Fusion engine will employ the measurements
from this wheelspeed sensor. This setting does not affect the sensor’s operation.
• Translation – Translation – Translation vector from the center of the Vision-RTK 2’s
reference frame to the wheelspeed sensor axis (see Figure 3.6 for reference).
The general configuration shared by all sensors includes the following fields:
• Wheelspeed sign – Indicates if the wheelspeed values are signed (i.e., negative
for backward movement and positive for forward). If unchecked, the Fusion engine
interprets only the magnitude of the wheelspeed values and considers the unknown
direction of motion. Keep this setting unchecked when mixing sensors with signed
and unsigned values.
• Record raw CAN – When enabled, the sensor records the CAN frames in the bus.
Only use when advised, as this option will impact performance.
Wheelspeed sensors
Presets
Sensor 1 Enable
Sensor 2
Enable
Sensor 3 Enable
Sensor 4 Enable
Sensor 5 Enable
General configuration
Wheelspeed sign
Record raw CAN
Sensors configuration
Fixposition CAN message (vehicle speed, CAN)
Fixposition CAN message (four wheels, CAN)
I/O message (vehicle speed, I/O port)
I/O message (four wheels, I/O port)
Agilex Bunker (CAN)
Agilex Scout (CAN)
ArchDrive e-car (CAN)
ArchDrive small robot (CAN)
DFCVT (CAN)
Falcon (CAN)
Kyburz DX bike (CAN)
Neolix (CAN)
PIX Moving (CAN)
Renault (CAN)
Status Configuration System fp-5cba80
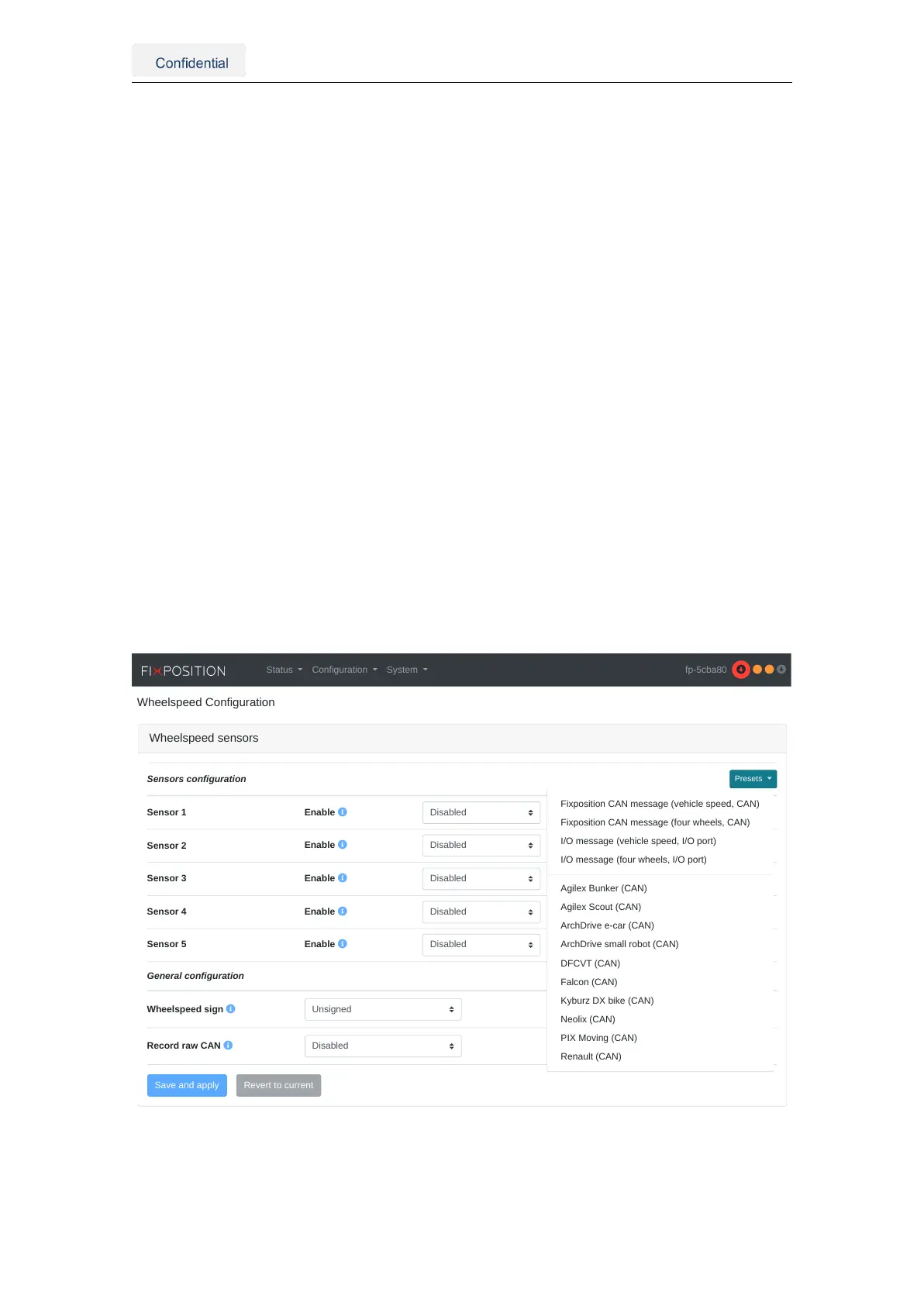
Figure 5.18.: Preset list of the CAN and I/O wheelspeed configurations
The Fixposition CAN message can support wheelspeed measurements from one or four
wheels. However, if two or more wheels are used, the user can combine their vectors and
Vision-RTK 2 | Fixposition Positioning Sensor 31