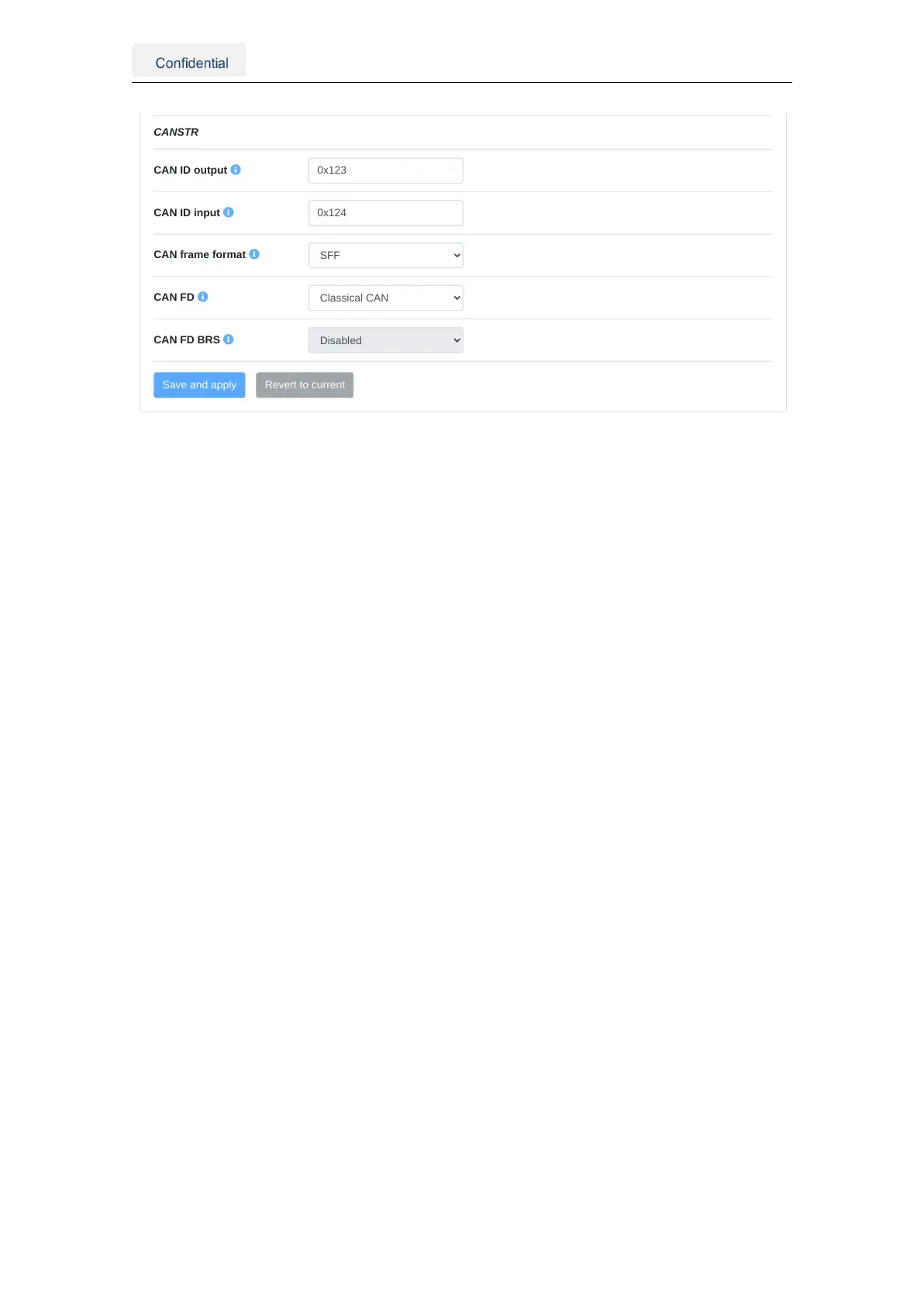
CANSTR
CAN ID output
CAN ID input
CAN frame format
CAN FD
CAN FD BRS
Figure 5.10.: CANSTR module configuration
5.3.3. Output generator
The user can configure the Fusion output at the Output generators module inside the
"Configuration → I/O" panel of the web interface, as shown in Figure 5.11. The following
configuration options are available:
• Fusion output frequency: Rate in [Hz] at which the Fusion generates its output.
Range: 1-100.
• Fusion output offset: Specifies how much time ahead Fusion calculates its output
[s], compensating for output or processing latency (at the cost of some accuracy).
Range: 0.0-0.2.
• TF output frequency: Output frequency in [Hz] for the TF output. Range: 1-10.
• NMEA output format: NMEA format used by the Fusion output.
• Strict NMEA: Strictly follow the NMEA specifications.
• High-Precision: Enable output of non-standard data fields with more precision.
• Output Point of Interest configuration: Parameters to transform the output from
the sensor frame to the Point of Interest (POI); see Section 5.12 for more details.
• Output translation: Translation vector in [m] from the sensor frame to the POI.
Range: -100.0-100.0.
• Output rotation: Rotation from the sensor frame to the POI using ZYX Euler
angles (yaw-pitch-roll) in degrees. Range: -180.0-180.0”.
Vision-RTK 2 | Fixposition Positioning Sensor 22