47
MP60, MP60DP
SCHNITTSTELLENBESCHREIBUNG CAN
9 SCHNITTSTELLENBESCHREIBUNG CAN
9.1 Allgemeines
Die Module MP60 und MP60DP verfügen über eine eingebaute CAN‐Schnittstelle, über
die sowohl Messwerte übertragen werden können als auch die Parametrierung des Mo
duls vorgenommen werden kann. Die Baudrate ist wählbar, maximal ist 1 MBaud möglich.
Das Protokoll der Schnittstelle orientiert sich am CANopen Standard.
9.2 Zyklische Messwertübertragung
Die zyklischen Daten werden als so genannte “Process Data Objects” (PDOs, nach CANo
pen Festlegungen) übertragen. Die interessierenden Messwerte werden ohne weitere
Kennzeichnung unter einem vorher festgelegten CAN‐Identifier zyklisch vom Messmodul
gesendet. Eine Abfragenachricht wird nicht benötigt. Wie oft die PDOs versendet werden,
wird als Parameter eingestellt (siehe Objektverzeichnis). Datenformate mit einer Länge
von mehr als einem Byte werden immer in der Reihenfolge LSB‐MSB gesendet.
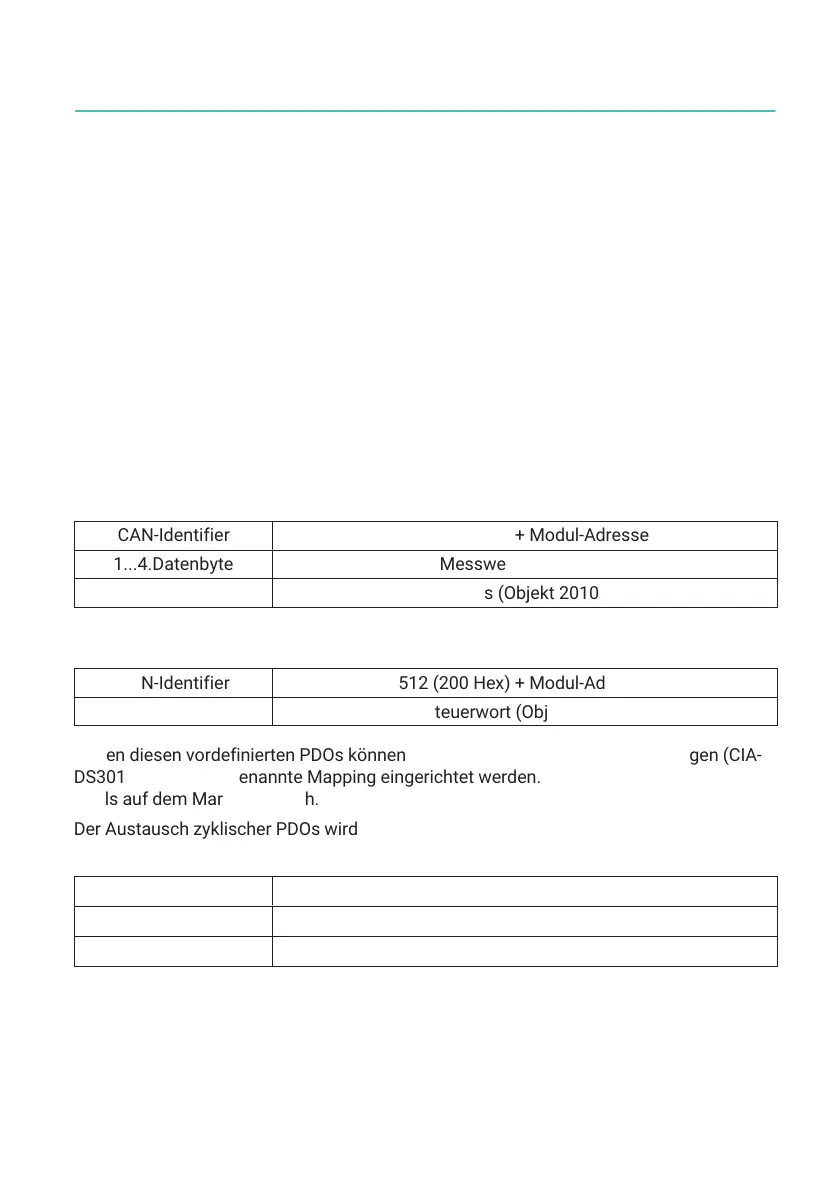
Sende‐PDO
CAN‐Identifier
ÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑ
ÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑ
384 (180 Hex) + Modul‐Adresse
1...4.Datenbyte
ÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑ
ÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑ
Messwert (LSB‐MSB)
5. Datenbyte
ÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑ
ÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑ
Status (Objekt 2010)
Empfangs‐PDO
CAN‐Identifier
ÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑ
ÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑ
512 (200 Hex) + Modul‐Adresse
1. Datenbyte
ÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑ
ÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑ
Steuerwort (Objekt 2630)
Neben diesen vordefinierten PDOs können weitere gemäß CANopen Festlegungen (CIA‐
DS301) über das sogenannte Mapping eingerichtet werden. Hierzu sind entsprechende
Tools auf dem Markt erhältlich.
Der Austausch zyklischer PDOs wird erst gestartet, nachdem das Modul in den Zustand
”Operational” gebracht wurde. Dies geschieht mit der Nachricht ”Start_Remote_Node”.
CAN‐Identifier
ÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑ
ÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑ
0
1. Datenbyte
ÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑ
ÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑ
1
2. Datenbyte
ÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑ
ÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑÑ
Modul‐Adresse (0 = alle)
Der Zustand ”Operational” kann wieder verlassen werden durch die Nachricht ”En
ter_Pre_Operational_State”: