Goodrive350 IP55 High-ingress Protection Series VFD Function parameter list
-135-
1
5
12
60
116%
200%
Time(min)
Motor overload multiple
150% 180%
Setting range: 20.0%–120.0%
Power display
calibration
coefficient of
motor 1
This function adjusts the power display value of
motor 1 only, and it does not affect the control
performance of the VFD.
Setting range: 0.00–3.00
Parameter
display of motor
1
0: Display as per motor type; under this mode,
only parameters related to current motor type
will be displayed.
1: Display all; under this mode, all the motor
parameters will be displayed.
System inertia of
motor 1
P03––Vector control of motor 1
Speed loop
proportional gain
1
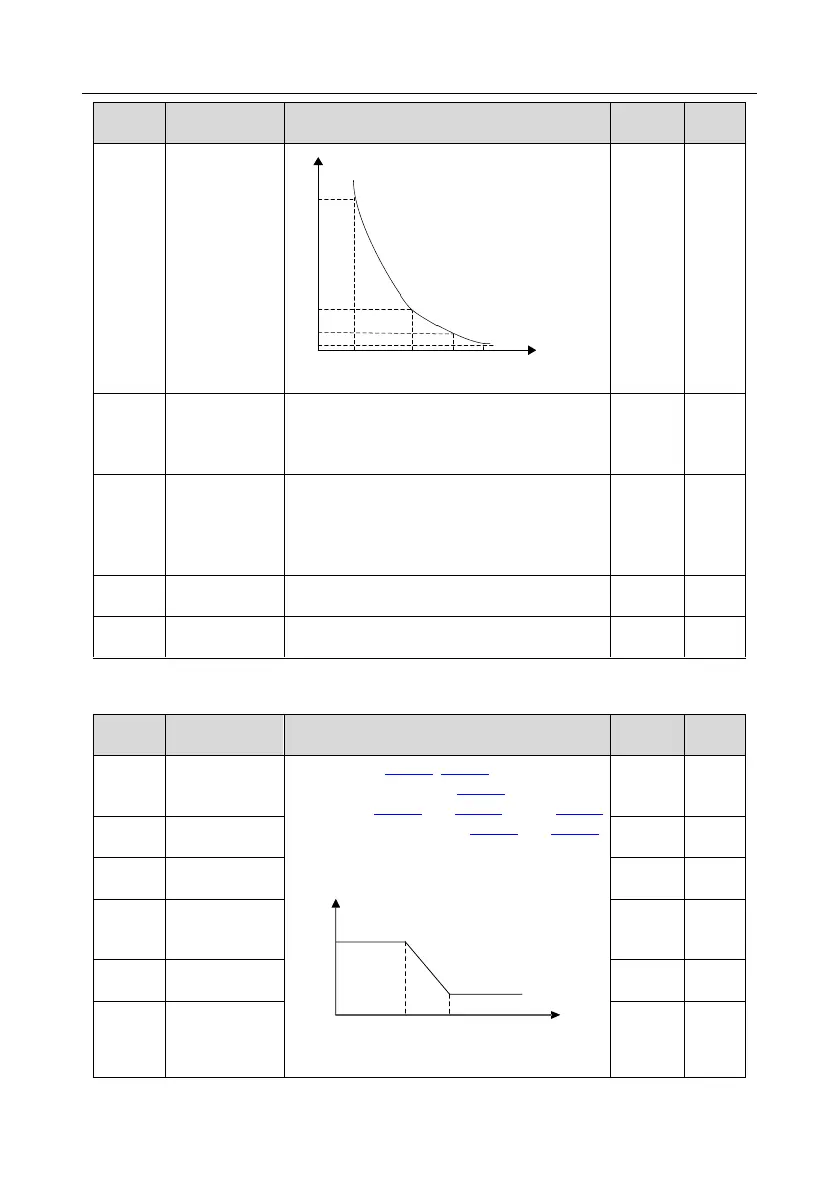
Parameters of P03.00–P03.05 fit for vector
control mode only. Below P03.02, speed loop PI
parameter is P03.00 and P03.01; above P03.05,
speed loop PI parameter is P03.03 and P03.04;
in between, PI parameter is obtained by linear
variation between two groups of parameters, as
shown below.
Output frequency f
PI parameter
P03.02 P03.05
P03.03, P03.04
P03.00, P03.01
The speed loop dynamic response
characteristics of vector control can be adjusted
Speed loop
integral time 1
Switch low point
frequency
Speed loop
proportional gain
2
Speed loop
integral time 2
Switch over high
point frequency

 Loading...
Loading...