Goodrive350 IP55 High-ingress Protection Series VFD Basic Operation Instructions
-84-
Corresponding HDO output of
upper limit
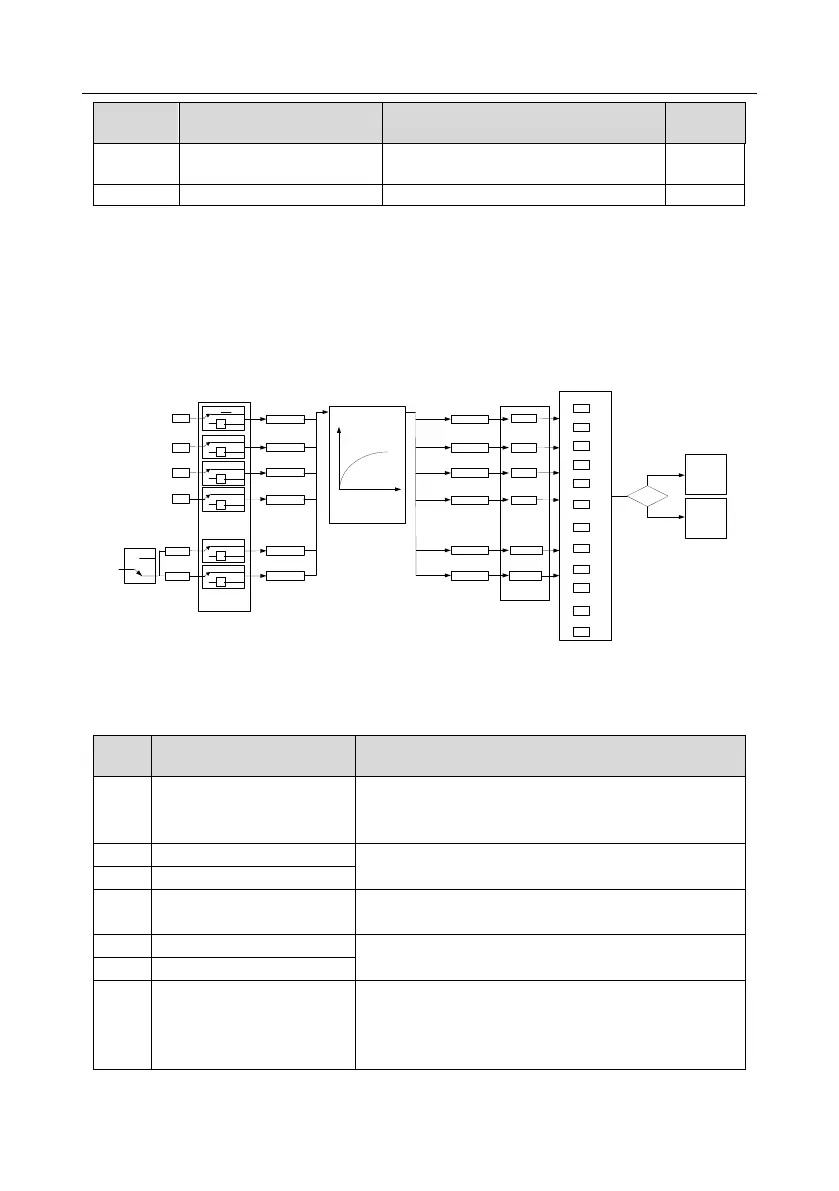
5.5.11 Digital input
The GD350 IP55 series VFD carries four programmable digital input terminals and two HDI
input terminals. The function of all the digital input terminals can be programmed by function
codes. HDI input terminal can be set to act as high-speed pulse input terminal or common
digital input terminal; if it is set to act as high-speed pulse input terminal, users can also set
HDIA or HDIB high-speed pulse input to serve as the frequency reference and encoder signal
input.
S1
S2
S3
S4
HDIA
HD1B
P05.08 (input terminal polarity)
P05.01
P05.02
P05.03
P05.04
T delay
T delay
T delay
T delay
T delay
T delay
P05.13
P05.15
P05.17
P05.19
P05.21
P05.23
0
1
2
3
4
5
.
.
.
.
29
30
P05.09 (digital filter time)
(Default value is 1)
(Default value is 4)
(Default value is 7)
(Default value is 0)
(Default value is 0)
(Default value is 0)
P05.00
(HDI input type)
0
1
0
1
-1
0
1
-1
0
1
-1
0
1
-1
0
1
-1
0
1
-1
P17.12
Digital input
terminal state
P07.39
Input terminal
state of present
fault
Fault?
Fault
Run
Digital function selection
T delay
T delay
T delay
T delay
T delay
T delay
P05.12
P05.14
P05.16
P05.18
P05.20
P05.22
P05.05
P05.06
This parameter is used to set the corresponding function of digital multi-function input
terminals.
Note: Two different multi-function input terminals cannot be set to the same function.
The VFD does not act even if there is signal input; users
can set the unused terminals to "no function" to avoid
misacts.
Control the forward/reverse running of the VFD by
external terminals.
Set the VFD running mode to the 3-wire control mode by
this terminal. See P05.13 for details.
Frequency when jogging, see P08.06, P08.07 and P08.08
for jogging acceleration/deceleration time.
The VFD blocks output, and the stop process of motor is
uncontrolled by the VFD. This mode is applied in cases of
large-inertia load and free stop time; its definition is the
same with P01.08, and it is mainly used in remote control.

 Loading...
Loading...