317
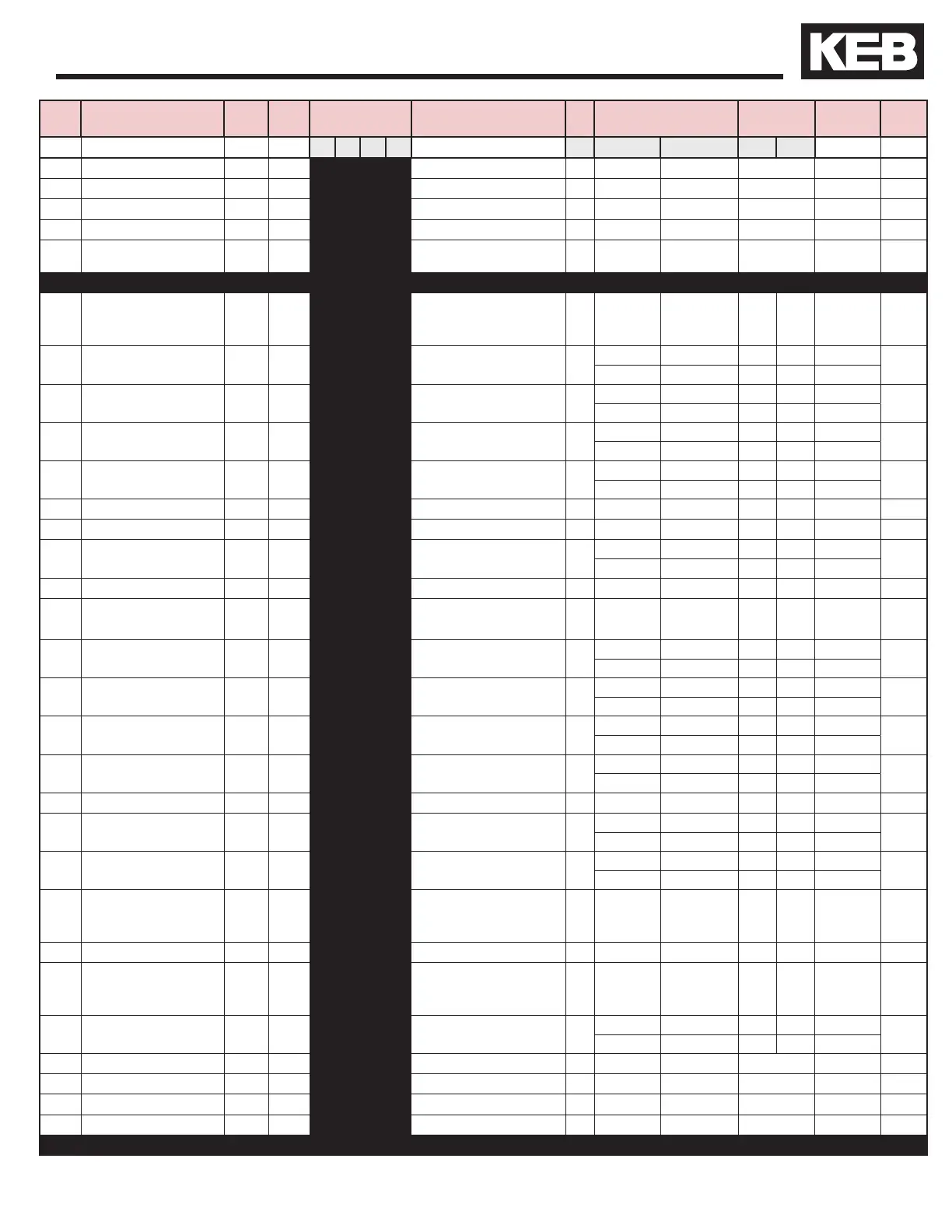
Parameter Reference
I = Induction Geared, IX = Induction Gearless, P = PM Geared, PX = PM Gearless
Para. Name
Hex v1.72 Motor/Gear Type
Setting
Options
NUM
Range Units Default
Pass
Level
I IX P PX Min. Max. Imp. Met.
LT12 Current Hold Time
0E8C LF78 - - 0.00 2.00 sec 0.50 Adjuster
LT 13 Current Ramp Down Time
0E8D LF79 - - 0.10 2.55 sec 0.30 Adjuster
LT15 AFE HV Idle Time
0E8F - - - 0.00 Always On sec 0-Always on OEM
LT30 OLED Run Time
0E9E - - - 0.00 65535 sec 0.600 OEM
LT31
OLED Constant Speed
Delay
0E9F - - - 0.00 65535 sec 0.200 OEM
LP01 Positioning Control
0C81 LP1
Off
Posi One Floor
Learn Slowdown
Position Value Reset
0
1
2
3
- - - - Off Basic
LP02
Minimum Slowdown
Distance
0C82 LP2
RO RO RO RO
- -
0.00 600.00 in - 0.00
Basic
0.0 - 0.0
LP03
High Speed Slowdown
Dist.
0C83 LP3 - -
0.00 600.00 in - 0.00
Basic
0.0 - 0.0
LP04
Short Floor Slowdown
Distance
0C84 - - -
0.00 600.00 in - 0.00
Basic
0.0 - 0.0
LP05 Correction Distance
0C85 LP4 - -
0.00 25.00 in - 0.00
OEM
0.0 - 0.0
LP06 Scaling Increments High
0C86 LP21 - - 0 9999 - - 0 Adjuster
LP07 Scaling Increments Low
0C87 LP22 - - 0 9999 - - 0 Adjuster
LP08 Scaling Distance
0C88 LP23 - -
0.00 600.00 in - 0.00
Adjuster
0.0 15240.0 - mm 0.0
LP10 Floor Number
0C8A - Not yet implemented - 1 30 - - 1 -
LP11 Floor Enable
0C8B -
Not yet implemented
Disabled
Enabled
0
1
- - - - Disabled -
LP12 Floor Position
0C8C - Not yet implemented -
0.0 6553.5 in - 0.0
-
-
LP13 Correction Distance Up
0C8D - Not yet implemented -
0.0 25.0 in - 0.0
-
-
LP14 Correction Distance Down
0C8E - Not yet implemented -
0.0 25.0 in - 0.0
-
-
LP15 Max Floor Speed
0C8F - Not yet implemented -
0 1600 ft/min - 0
-
0.00 8.00 - m/s 0.00
LP16 Floor Label
0C90 - Not yet implemented - 1 65535 - - 1 -
LP18 Leveling Distance
0C92 - Not yet implemented -
0.0 12.0 in - 0.0
-
-
LP19 Re-leveling Distance
0C93 - Not yet implemented -
0.0 3.0 in - 0.0
-
-
LP20 Position Feedback Source
0C94 -
Not yet implemented
Motor Encoder
Encoder 2
CAN Encoder
0
1
2
- - - -
Motor
Encoder
OEM
LP21 Reference Floor
0C95 - Not yet implemented - 0 30 - - 1 OEM
LP22 Reference Direction
0C96 -
Not yet implemented
Up
Down
Up + Down
0
1
2
- - - - Up OEM
LP23 Reference Speed
0C97 - Not yet implemented -
0 1600 ft/min - 0
OEM
0.00 8.00 - m/s 0.00
LP24 Kp Position Acceleration
0C98 - Not yet implemented - 0 32767 - 500 OEM
LP25 Kp Position Deceleration
0C99 - Not yet implemented - 0 32767 - 500 OEM
LP26 Kp Speed Limit Reduction
0C9A - Not yet implemented - 0 100 % 100 OEM
LP27 Limit for p/s control
0C9B - Not yet implemented - 0 100 % 10 OEM

 Loading...
Loading...
















