1775 IMU Technical Manual
15
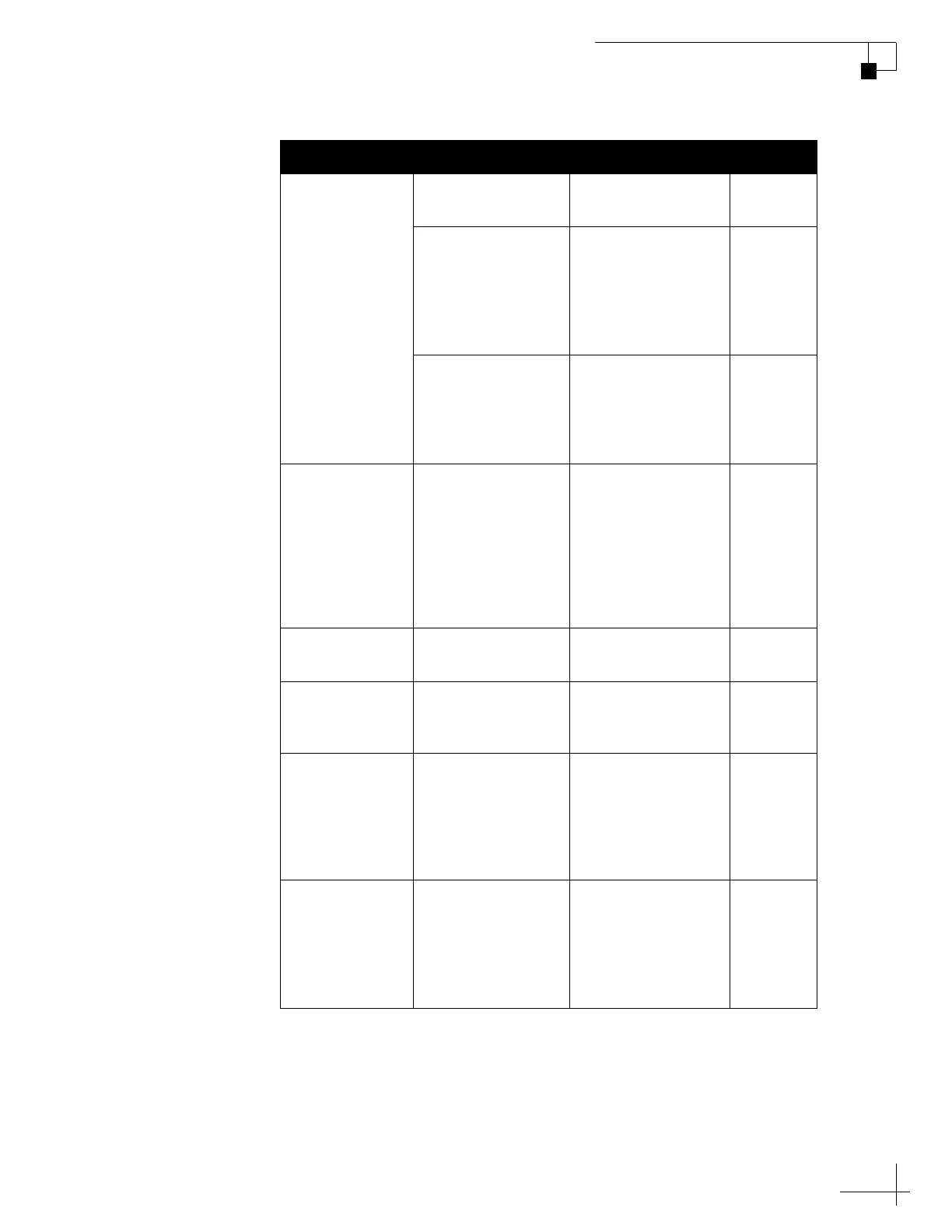
Data Output Signal Processing
For more information, refer to “Appendix C: Electrical Signaling ICD”
on page 31. Settings are saved and reapplied on restart. You may
revert to the factory default settings at any time (see “Resetting
Parameters to Factory Defaults” on page 16).
NOTE: Changing parameters from their default values may impact
performance.
Output Filter =FILTEN,<x>0 (disabled)
1 (enabled)
1
=FILTTYPE,A,<x>
(accel)
or
=FILTTYPE,G,<x>
(gyro)
CHEBY
(Chebyshev)
BUTTER
(Butterworth)
AVE
(Uniform Averager)
CHEBY
=FC20,A,<x>
(accel)
or
=FC20,G,<x>
(gyro)
Custom
(accelerometer or
gyro filter
coefficients)
CHEBY
X, Y, Z Axis
Definitions
=AXES,
[X0], [X1], [X2],
[Y0], [Y1], [Y2],
[Z0], [Z1], [Z2]
Floating point
values defining a
3x3 rotation matrix
sets the output axes
relative to the
physical orientation
of measurement
axes (see page 6).
1 0 0
0 1 0
0 0 1
Output
Synchronization
=MSYNC,<x> EXT (external)
IMU
IMU
Linear
(Accelerometer)
Data Format
=LINFMT,<x> ACCEL
DELTA
RESET
ACCEL
Linear
(Accelerometer)
Data Units
(only applies if
data output is
set to delta)
=LINUNITS,<x> METERS (mps)
FEET (fps)
RESET
METERS
Message
Output Format
=OUTPUTFMT,<x> A (36 bytes)
B (with timestamp
(40 bytes))
C (magnetometer
data interleaved (38
bytes))
A
Parameter Command Options Default

 Loading...
Loading...