1775 IMU Technical Manual
6
Output Orientation
Output Orientation
The 1775 IMU senses acceleration and angular velocity on three
physical axes, as shown in Figure 3 and Figure 4. You may configure a
rotation matrix to set the output axes relative to the physical
orientation of these measurement axes, allowing the IMU to measure
motion in three arbitrarily orthogonal axes (see “Configuration
Options” on page 14). These settings are saved and reapplied on
restart. You may revert to the factory default settings at any time (see
“Resetting Parameters to Factory Defaults” on page 16).
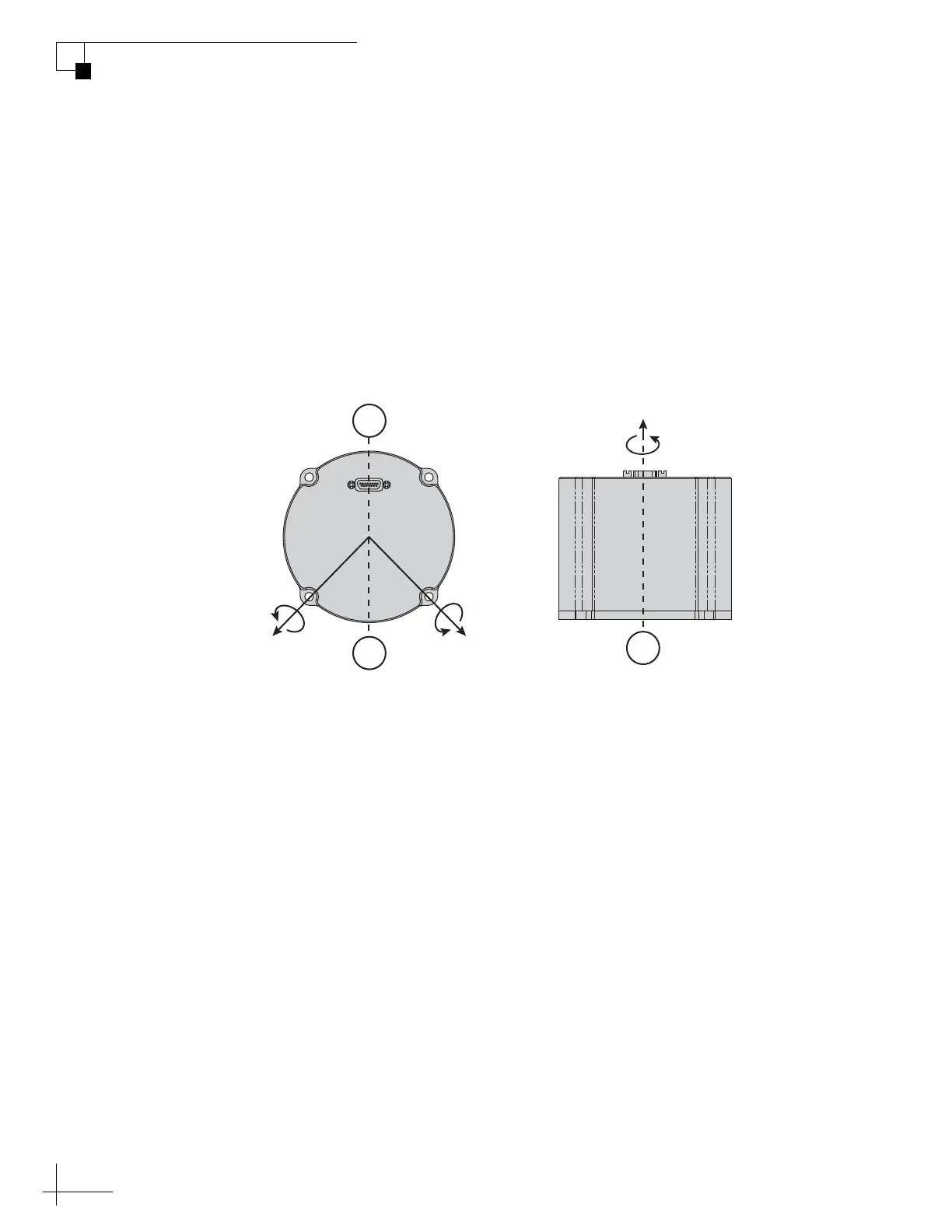
Figure 3: Gyro Measurement Axes Orientation
NOTE: The three axes of rotation are coincident with the linear acceleration
axes. Positive rotation is a counterclockwise rotation about an axis when
viewed from +∞ along that axis. Linear acceleration polarity is such that the
IMU will report +1 G due to Earth gravity when its + axis is up. The rotation
matrix only applies to gyro and accelerometer data. Magnetic data in output
Format C is not affected.
Top View Side View
+Y+X
+Z
C
L
C
L
C
L

 Loading...
Loading...