Lenze · i700 servo inverter · reference manual · DMS 3.0 EN · 06/2016 · TD06 116
5 Motor control & motor settings
5.11 Setting control loops
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
For the automatic calculation of the two controller parameters, the "Current controller: Calculate
controller parameters" function is provided via object 0x2822
(or 0x3022 for axis B).
• The calculating function is based on the stator resistance (0x2C01:2
or 0x3401:2 for axis B) and
the stator leakage inductance (0x2C01:3
or 0x3401:3 for axis B). Thus, these motor parameters
have to be parameterised before. This can be done either by entering the data sheet values
manually or by a motor parameter identification run.
The controller parameters calculated can be optimised subsequently by means of an experimental
adjustment process the procedure of which is described in the following subchapter, Manual test
mode "Current pulse".
Tip!
To ensure a smooth transition to the field weakening range, it is recommended to apply the
equations for the synchronous motor for the asynchronous motor as well.
Note!
If one of the values calculated exceeds the upper object limit, the value is limited to the
limit value.
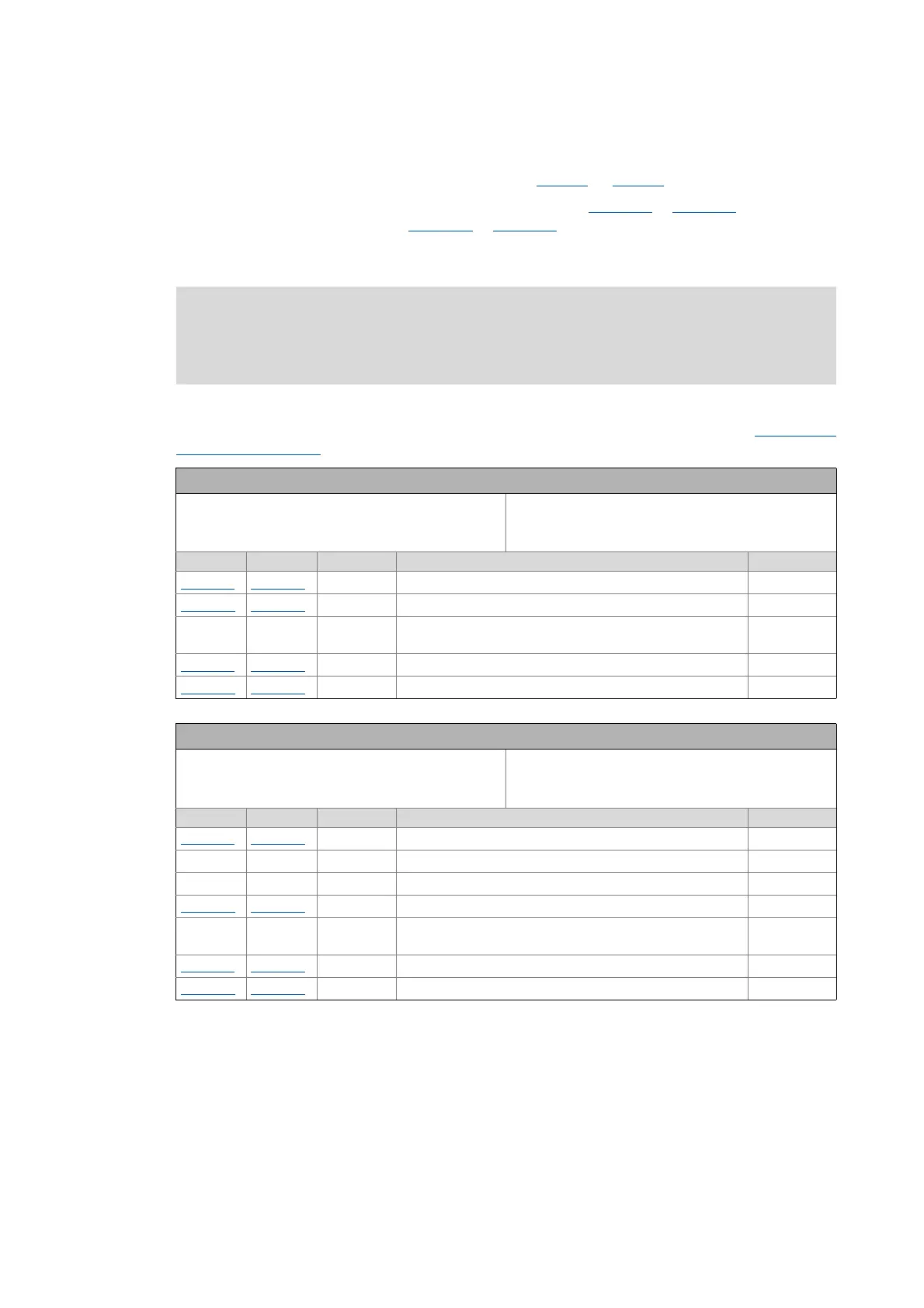
Equations for calculating the gain and the reset time for the synchronous motor
Axis A Axis B Symbol Description Dimension unit
0x2942:1 0x3142:1 V
p
Current controller gain V/A
0x2C01:3
0x3401:3 L
ss
Motor stator inductance H
-- T
dead time
Equivalent time constant for analog detection and scanning
= 0.00034 s (340 μs)
s
0x2942:2
0x3142:2 T
n
Current contr. reset time s
0x2C01:2
0x3401:2 R
s
Motor stator resistance (value at 20°C) Ω
Equations for calculating the gain and the reset time for the asynchronous motor
Axis A Axis B Symbol Description Dimension unit
0x2942:1 0x3142:1 V
p
Current controller gain V/A
-- σ Leakage
-- L
s
Motor stator inductance H
0x2C01:3
0x3401:3 L
ss
Motor stator leakage inductance H
-- T
dead time
Equivalent time constant for analog detection and scanning
= 0.00034 s (340 μs)
s
0x2942:2
0x3142:2 T
n
Current contr. reset time s
0x2C01:2
0x3401:2 R
s
Motor stator resistance (value at 20°C) Ω
V
p
L
ss
T
Dead time
-------------------------
=
V
p
σ L
s
⋅
T
Dead time
-------------------------
2L
ss
⋅
T
Dead time
-------------------------
≈=
T
n
σ L
s
⋅
R
s
------------
2L
ss
⋅
R
s
--------------
≈=