6 Holding brake control
6.5 Basic signal flow
170
Lenze · i700 servo inverter · reference manual · DMS 3.0 EN · 06/2016 · TD06
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
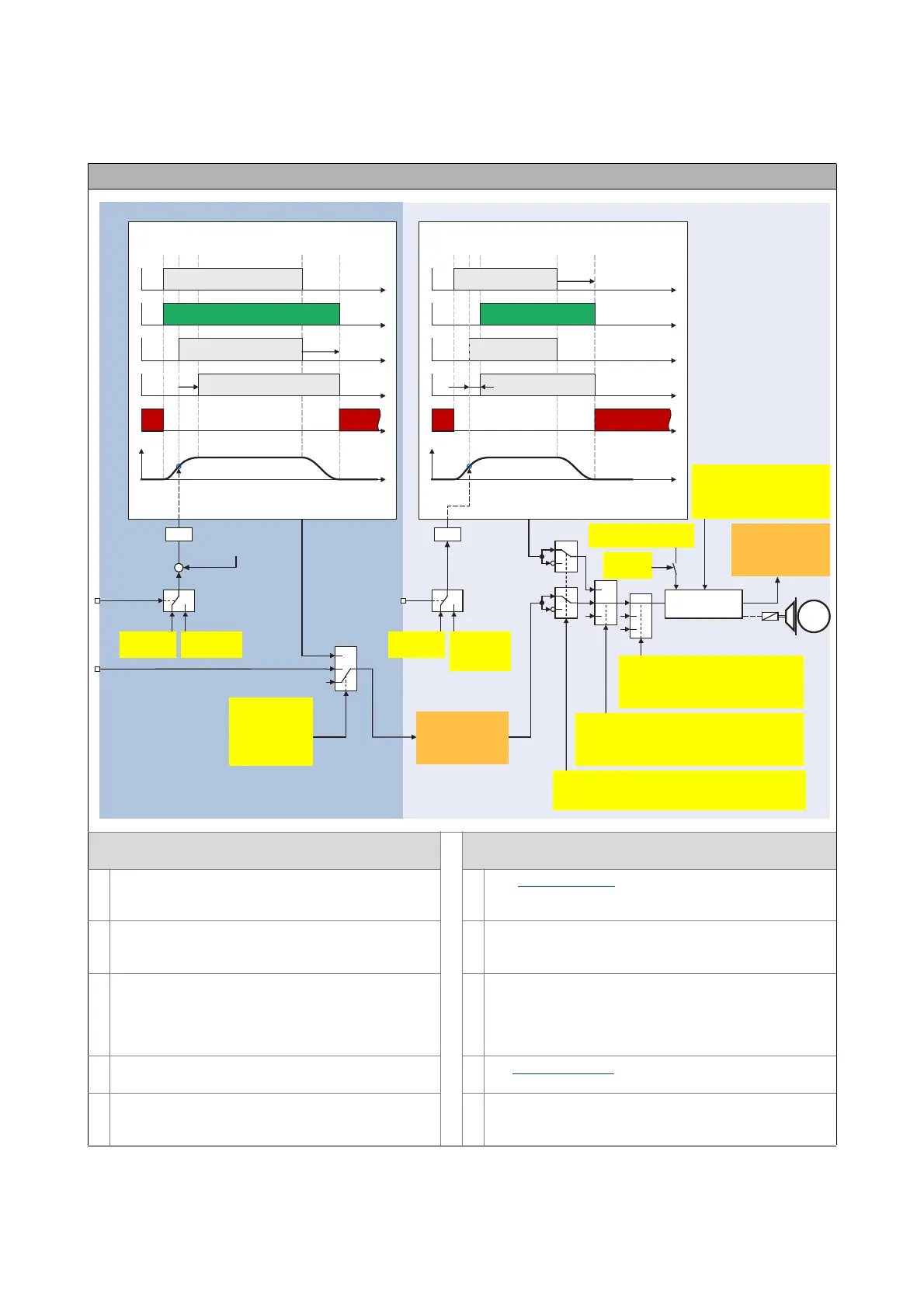
Principal signal flow of the holding brake control (with the respective operating mode compared to the automatic control)
L_MC1P_BrakeInterface - process of the automatic control: Servo Inverter i700 - process of the control via device status
machine:
When MC_Power.bRegulatorOn = TRUE, the i700 is
enabled and the starting torque for the torque
feedforward control is specified simultaneously.
The "Enable operation
" command serves to enable the i700
and simultaneously specify the starting torque for the
torque feedforward control.
When the actual torque is = 0.9 x starting torque, the
holding brake is triggered to be released. The triggering
is signalled at the xBrakeReleaseOut output.
When the actual torque is = 0.9 x starting torque, the starting
torque is triggered to be released.
After the brake opening time has elapsed, the "holding
brake released" status is reported via the xBrakeReleased
output.
From now on, the Servo Inverter i700 can perform
motions.
After the brake opening time has elapsed, the "holding brake
released" status is reported via the CiA402 status word
(bit 14).
From now on, the Servo Inverter i700 can perform
motions.
When MC_Power.bRegulatorOn = FALSE, the holding
brake is triggered to be closed.
The Disable operation
" command serves to trigger the
holding brake to be closed.
Only after the brake closing time has elapsed, the i700 is
inhibited. The xBrakeReleased output reports the
"Holding brake closed" status.
Only after the brake closing time has elapsed, the i700 is
inhibited. The CiA402 status word (bit 14) serves to report
the "Holding brake closed" status.
t
t
t
CINH
02 3
OperationEnabled
t
BrakeReleased
t
tt
t
CINH
MC_Power.bRegulatorOn
01 123
xBrakeReleaseOut BrakeReleaseOut
t
xBrakeReleased
tt
4
lrActTorque ActTorque
Servo-Inverter i700
t
OperationEnabled
MM
1 10 0
1
1
0
0
2
2
1
0
M
1
2
0
L_MC1P_
BrakeInterface.
IrTorqueAdd
0.9
*
0.9
*
4
1
0
FB L_MC1P_BrakeInterface
+
xReleaseBrake
(0x2820:10 /
0x3020:10)
0x2820:9/1
0x3020:9/1
EnableOperation
control value
Operating mode 0: Triggering via state machine of deviceBrake mode 2: Automatic Operation
Brake opening time ( )subindex 111
Brake closing time (subindex 112)
Brake release time (0x2820:3 | 0x3020:3)
Brake application time ()0x2820:2 | 0x3020:2
Controlword
Bit 14:
0: Close brake
1: Release brake
Brake: Control logic
0: Positive logic
1: Negative logic
(0x2820:5|0x3020:5)
Brake: Operating mode
0: Triggering via state machine of device
2: No brake connected
1: Triggering via control word from ext. controller
(0x2820:1|0x3020:1)
Triggering
holding brake
Statusword
Bit14:
0: Brake closed
1: Brake released
Brake: Brake identification
Brake monitoring: Response
(0x2820:4|0x3020:4)
(0x2820:6|0x3020:6)
Source of
starting torque
(subindex 117)
Source of
starting torque
(0x2820:9 /
0x3020:9)
Last stopping
value
Last stopping
value
Starting torque
(subindex 118)
Starting torque
Brake mode
(subindex 110)
1: Manuel
2:
0: Off
Automatic
(0x2820:10 | 0x2820:10)
Bremse: Override
1: Override open
2: Override close
0: No Override
(0x2820:11 | 0x3020:11)