3. Safety functions
MiR500 User guide (en) 09/2019 - v.1.3 ©Copyright 2018-2020: Mobile Industrial Robots A/S. 58
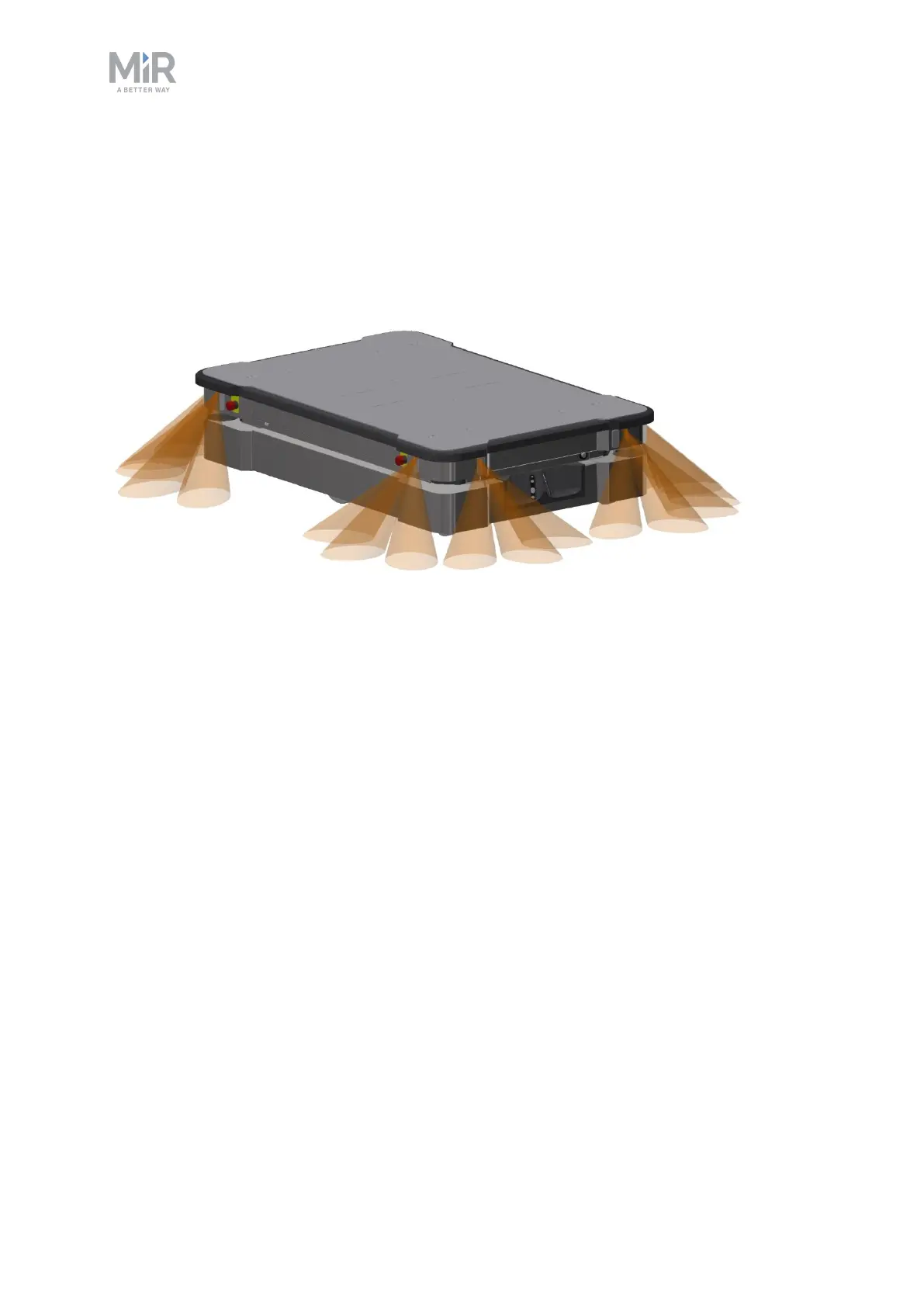
Proximity sensors
Proximity sensors placed in all four corners of the robot detect objects close to the floor that
cannot be detected by the safety laser scanners.
Using infrared light, the proximity sensors point downwards and make sure that the robot
does not run into low objects, such as pallets and forklift forks.
Figure 3.9. The proximity sensors in the corners of the robot detect objects close to the floor.
Internal sensors
The internal sensor system of the robot consists of the following components:
• Gyroscope (IMU)
Measures the orientation and angular velocity of the robot.
• Motor encoder
Provides closed loop feedback signals by tracking the speed and/or position of the motor
shaft.
• Accelerometer
Measures non-gravitational acceleration.
• Wheel encoders
Detect wheel movements.
3.9 Light indicators and warning sounds
The robot uses two types of light indicators to let people in the environment know what the
robot is currently doing or planning to do.
• Status lights
An LED light band on all four sides of the robot uses colors and light motion patterns to