3. Safety functions
MiR500 User guide (en) 09/2019 - v.1.3 ©Copyright 2018-2020: Mobile Industrial Robots A/S. 51
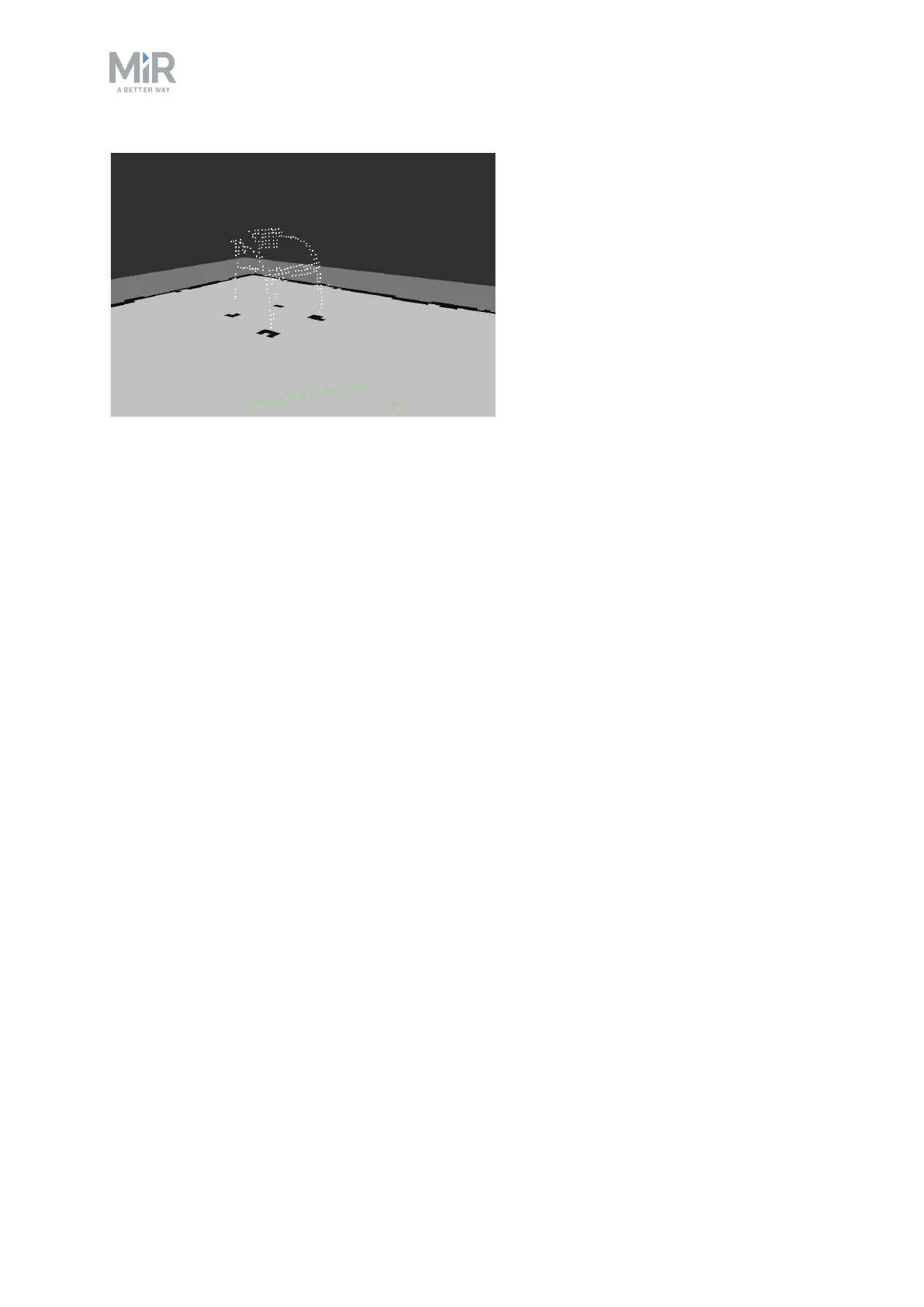
The 3D camera will detect more details of the chair when it is close enough to it.
Limitations
The safety laser scanners detect objects in a plane approximately 200 mm above ground.
Objects above or below this plane are not detected by the laser scanners.
The safety laser scanners cannot detect negative obstacles (downward going stairs or holes
in the floor) or any type of glass.
The limitations of the safety laser scanners shall be considered during the preparations of
the environment the robot will function in.
3.8 Sensor system
Collaboration between the robot’s internal and external sensors ensures that the robot can
navigate in the work environment and, most importantly, secures that it can operate safely
among people and objects, like furniture, machines, pallets etc.
This section describes the functionality of the different parts of the sensor system.
The robot is equipped with the following sensors:
• Safety laser scanners
• 3D cameras
• Proximity sensors
• Internal sensors