4MELFA-BASIC V
MELFA-BASIC V functions 4-90
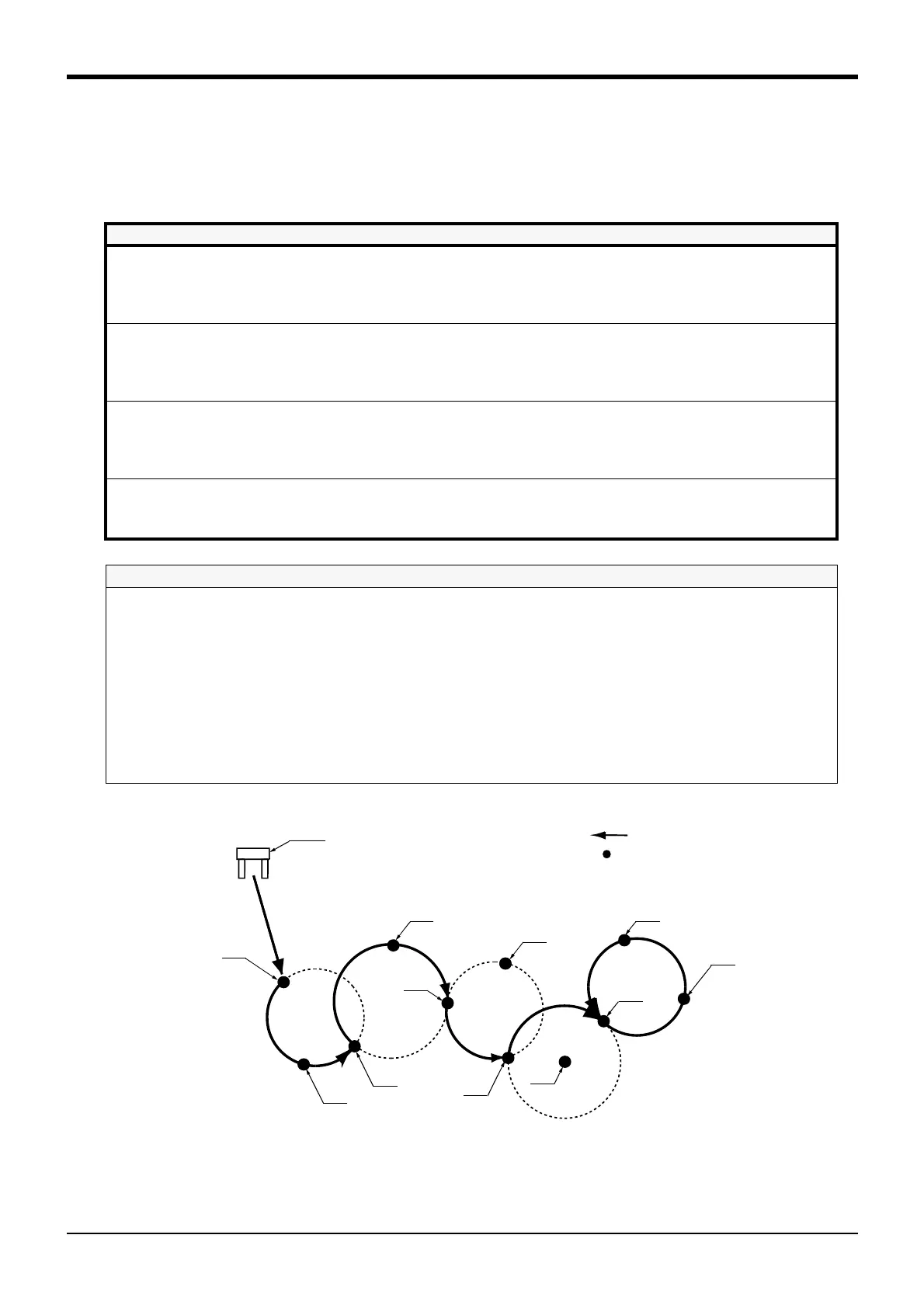
(3) Circular interpolation movement
The robot moves along an arc designated with three points using three-dimensional circular interpolation.
If the current position is separated from the start point when starting circular movement, the robot will move
to the start point with linear operation and then begin circular interpolation.
*Command word
*Statement example
*Program example
Command word
Explanation
Mvr Designates the start point, transit point and end point, and moves the robot with circular
interpolation in order of the start point - transit point - end point. It is possible to specify the
interpolation form using the TYPE instruction. An appended statement Wth or WthIf can be
designated.
Mvr2 Designates the start point, end point and reference point, and moves the robot with circular
interpolation from the start point - end point without passing through the reference point. It is
possible to specify the interpolation form using the TYPE instruction. An appended statement Wth
or WthIf can be designated.
Mvr3 Designates the start point, end point and center point, and moves the robot with circular
interpolation from the start point to the end point. The fan angle from the start point to the end
point is 0 deg. < fan angle < 180 deg. It is possible to specify the interpolation form using the
TYPE instruction. An appended statement Wth or WthIf can be designated.
Mvc Designates the start point (end point), transit point 1 and transit point 2, and moves the robot with
circular interpolation in order of the start point - transit point 1 - transit point 2 - end point. An
appended statement Wth or WthIf can be designated.
Statement example
Explanation
Mvr P1, P2, P3 .................................................................
' Moves with circular interpolation between P1 - P2 - P3.
Mvr P1, P2, P3 Wth M_Out (17) = 1................................
' Circular interpolation between P1 - P2 - P3 starts, and the output signal bit 17 turns ON.
Mvr P1, P2, P3 WthIf M_In (20) = 1, Skip .......................
' If the input signal bit 20 turns ON during circular interpolation between P1 - P2 - P3,
circular interpolation to P1 is stopped, and the program proceeds to the next step.
Mvr P1, P2, P3 TYPE 0, 1................................................
' Moves with circular interpolation between P1 - P2 - P3.
Mvr2 P1, P3, P11 .............................................................
' Circular interpolation is carried out from P1 to P3 in the direction that P11 is not passed.
P11 is the reference point.
Mvr3 P1, P3, P10 .............................................................
' Moves with circular interpolation from P1 to P3 in the direction with the smallest fan
angle. P10 is the center point.
Mvc P1, P2, P3.................................................................
' Moves with circular movement from P1 - P2 - P3 - P1.
(1)
(2)
(3)
(4)
(5)
P1
P2
P3
P4
P5
P7
P6
(Reference
point)
P10
P9
P11
P8
(Center point)
Hand
:Movement position
:Robot movement
Turn output
signal bit
18 ON.
Robot movement
 Loading...
Loading...


