4MELFA-BASIC IV
Detailed specifications of MELFA-BASIC V 4-140
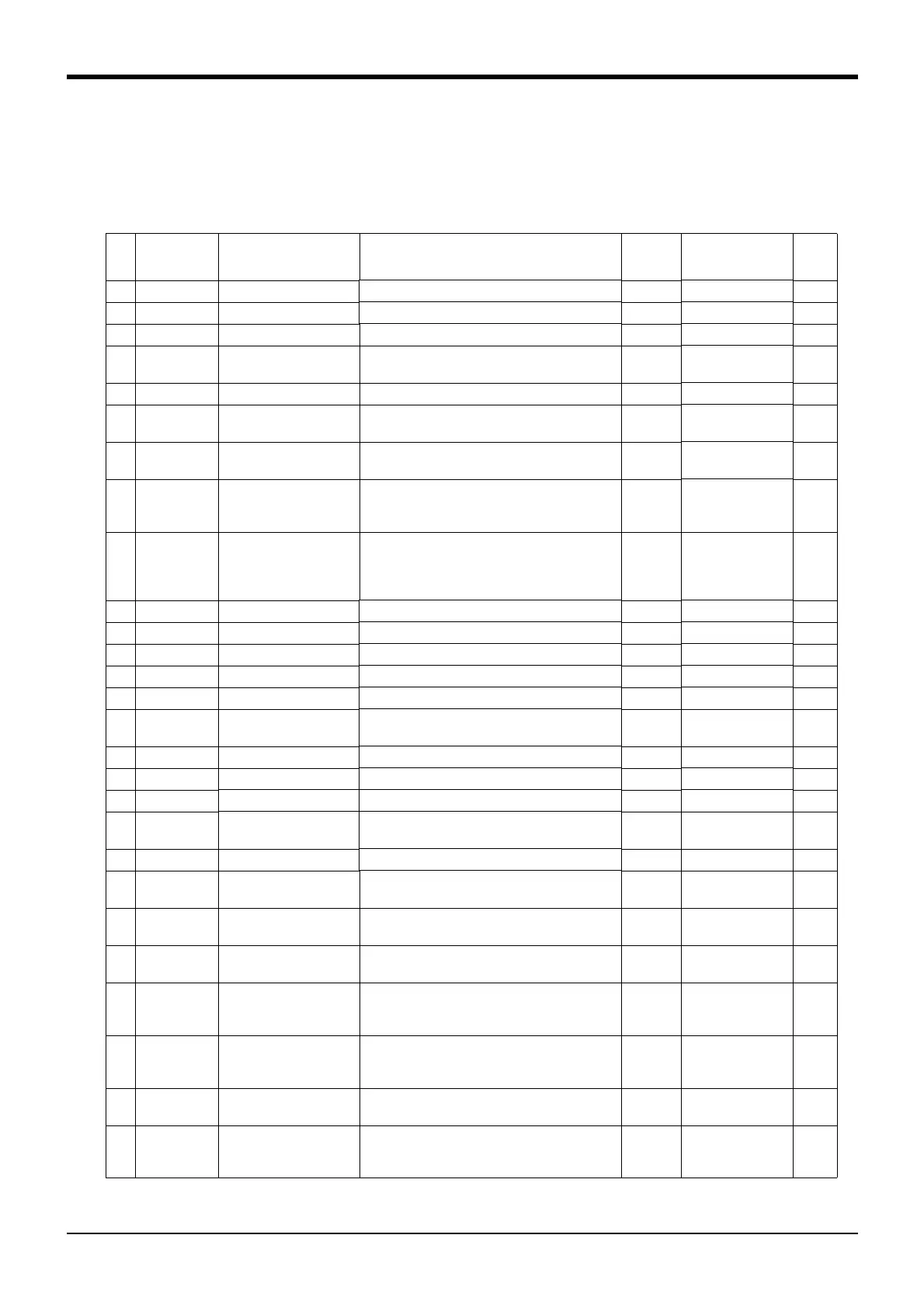
4.3.26 Robot status variables
The available robot status variables are shown in Table 4-8. As shown in the table, the variable name and
application are predetermined.
The robot status can be checked and changed by using these variables.
Table 4-8:Robot status variables
No
Variable
name
Array designation
Note1)
Details
Attribute
Note2)
Data type, Unit Page
1 P_Curr Mechanism No.(1 to 3)
Current position (XYZ) R Position type 304
2 J_Curr Mechanism No.(1 to 3)
Current position (joint) R Joint type 268
3 J_ECurr Mechanism No.(1 to 3)
Current encoder pulse position R Joint type 270
4 J_Fbc Mechanism No.(1 to 3)
Joint position generated based on the feedback
value from the servo
R Joint type 271
5 J_AmpFbc Mechanism No.(1 to 3)
Current feedback value R Joint type 271
6 P_Fbc Mechanism No.(1 to 3)
XYZ position generated based on the feedback
value from the servo
R Position type 305
7 M_Fbd Mechanism No.(1 to 3)
Distance between commanded position and
feedback position
R Position type 280
8 M_CmpDst Mechanism No.(1 to 3)
Amount of difference between a command value
and the actual position when the compliance
function is being performed
R Single-precision
real number type,
mm
274
9 M_CmpLmt Mechanism No.(1 to 3)
This is used to recover from the error status by
using interrupt processing when an error has
occurred while the command value in the
compliance mode attempted to exceed the limit.
R Integer type 275
10 P_Tool Mechanism No.(1 to 3)
Currently designated tool conversion data R Position type 306
11 P_Base Mechanism No.(1 to 3)
Currently designated base conversion data R Position type 302
12 P_NTool Mechanism No.(1 to 3)
System default value (tool conversion data) R Position type 306
13 P_NBase Mechanism No.(1 to 3)
System default value (base conversion data) R Position type 302
14 M_Tool Mechanism No.(1 to 3)
Tool No. (1 to 4) RW Integer type 295
15 J_ColMxl Mechanism No.(1 to 3)
Difference between estimated torque and actual
torque
R Joint type, % 269
16 M_ColSts Mechanism No.(1 to 3)
Impact detection status (1: Colliding, 0: Others) R Integer type 276
17 P_ColDir Mechanism No.(1 to 3)
Movement direction at collision R Position type 303
18 M_OPovrd None
Speed override on the operation panel (0 to 100%) R Integer type, % 283
19 M_Ovrd Slot No.(1to 32)
Override in currently designated program (0 to
100%)
R Integer type, % 283
20 M_JOvrd Slot No.(1to 32)
Currently designated joint override (0 to 100%) R Integer type, % 283
21 M_NOvrd Slot No.(1to 32)
System default value (default value of M_Ovrd)
(%)
R Single-precision
real number type, %
283
22 M_NJovrd Slot No.(1to 32)
System default value (default value of M_JOvrd)
(%)
R Single-precision
real number type, %
283
23 M_Wupov Mechanism No.(1 to 3)
Warm-up operation override (50 to 100%) R Single-precision
real number type, %
299
24 M_Wuprt Mechanism No.(1 to 3)
Time until the warm-up operation status is
canceled (sec.)
R Single-precision
real number type,
sec
300
25 M_Wupst Mechanism No.(1 to 3)
Time until the warm-up operation status is set
again (sec.)
R Single-precision
real number type,
sec
301
26 M_Ratio Slot No.(1to 32)
Fraction of the current movement left before
reaching the target position (%)
R Integer type, % 289
27 M_RDst Slot No.(1to 32)
Remaining distance left of the current movement
(only the three dimensions of X, Y, and Z are taken
into consideration: mm)
R Single-precision
real number type,
mm
290
 Loading...
Loading...


