5Functions set with parameters
Warm-Up Operation Mode 5-390
5.19 Warm-Up Operation Mode
(1) Functional Overview
The acceleration/deceleration speed and servo system of Mitsubishi robots are adjusted so that they can be
used with the optimum performance in a normal temperature environment. Therefore, if robots are operated
in a low temperature environment or after a prolonged stop, they may not exhibit the intrinsic performance
due to change in the viscosity of grease used to lubricate the parts, leading to deterioration of position accu-
racy and a servo error such as an excessive difference error. In this case, we ask you to operate robots in
actual productions after conducting a running-in operation (warm-up operation) at a low speed. To do so, a
program for warm-up operation must be prepared separately.
The warm-up operation mode is the function that operates the robot at a reduced speed immediately after
powering on the controller and gradually returns to the original speed as the operation time elapses. This
mode allows you to perform a warm-up operation easily without preparing a separate program. If an exces-
sive difference error occurs when operating the robot in a low temperature environment or after a prolonged
stop, enable the warm-up operation mode.
*To Use the Warm-Up Operation Mode
To use the warm-up operation mode, specify 1 (enable) in the WUPENA parameter and power on the con-
troller again.
Note: To use the warm-up operation mode on the robot other than the RV-SD series, it is necessary to spec-
ify a joint axis to be the target of the warm-up operation mode in the WUPAXIS parameter, other than
the WUPENA parameter. For more information, see "(2)Function Details"
*When the Warm-Up Operation Mode Is Enabled
When the warm-up operation mode is enabled, powering on the controller enters the warm-up operation
status (the speed is automatically reduced). In the warm-up operation status, the robot operates at a speed
lower than the specified operation speed, then gradually returns to the specified speed as the operation time
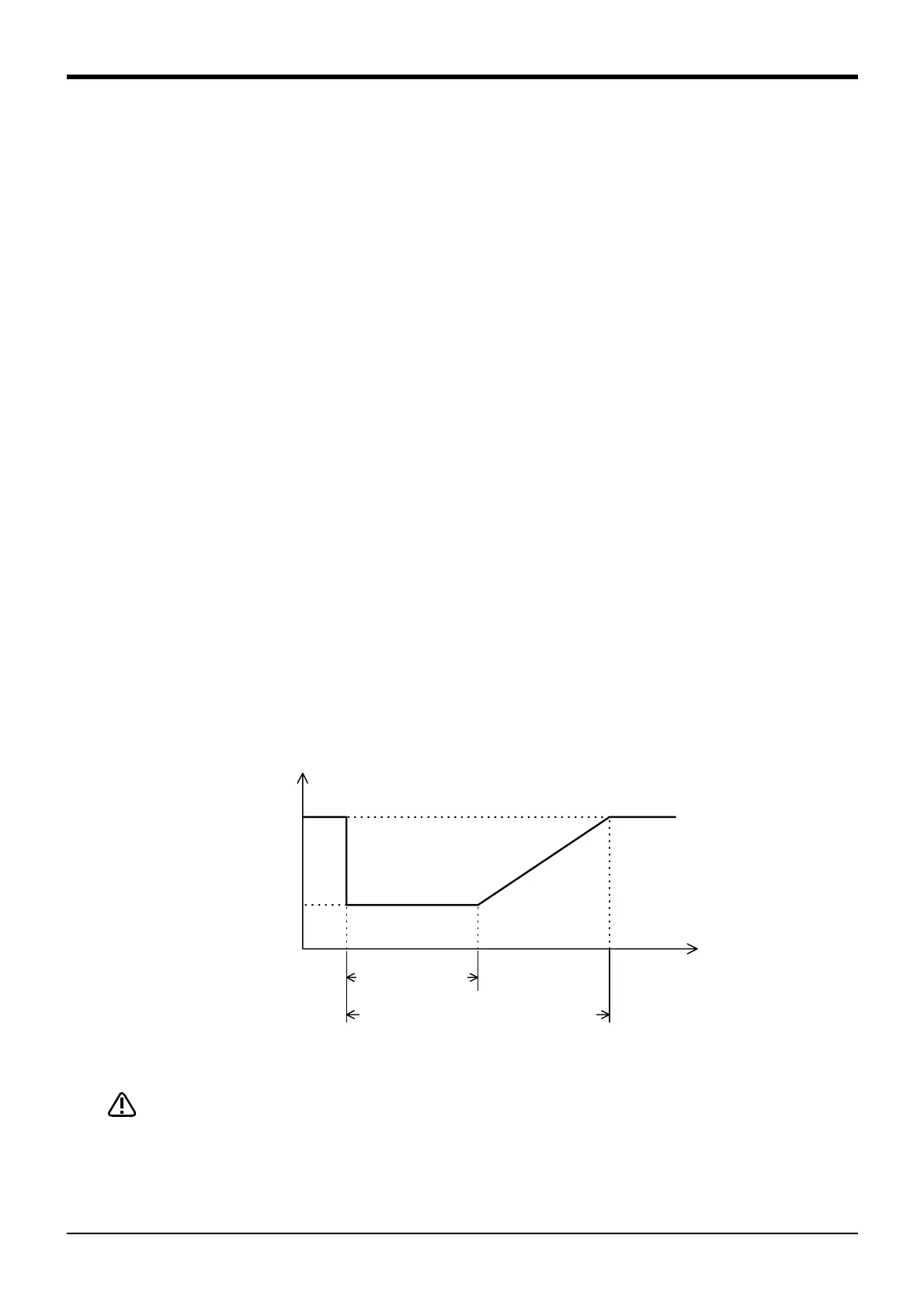
of a target axis elapses. The ratio of reducing the speed is referred to as the warm-up operation override.
When this value is 100%, the robot operates at the specified speed. In parameter setting at shipment from
the factory, the value of a warm-up operation override changes as shown in the Fig. 5-3 below according to
the operation time of a target axis.
Fig.5-3:Changes in Warm-Up Operation Override
Even in the warm-up operation status, the robot does not decrease its speed if the
MODE switch on the controller's front panel is set to "TEACH," for a jog operation or
for an operation by real-time external control (MXT instruction), and operates at the
originally specified speed.
100%
Time during which
values are constant
(30 sec)
Valid time of the warm-up operation status
(60 sec)
Warm-up operation
override
Time during
which a target
axis is operating
Initial value
(70%)
CAUTION
 Loading...
Loading...


