5Functions set with parameters
Warm-Up Operation Mode 5-392
(2) Function Details
1)Parameters, Dedicated I/O Signals and Status Variables of the Warm-Up Operation Mode
The following parameters, dedicated I/O signals and status variables have been added in the warm-up operation
mode. Refer to Page 343, "5.1 Movement parameter"
, Page 416, "6.3 Dedicated input/output" and Page 87, "4
MELFA-BASIC V" for details.
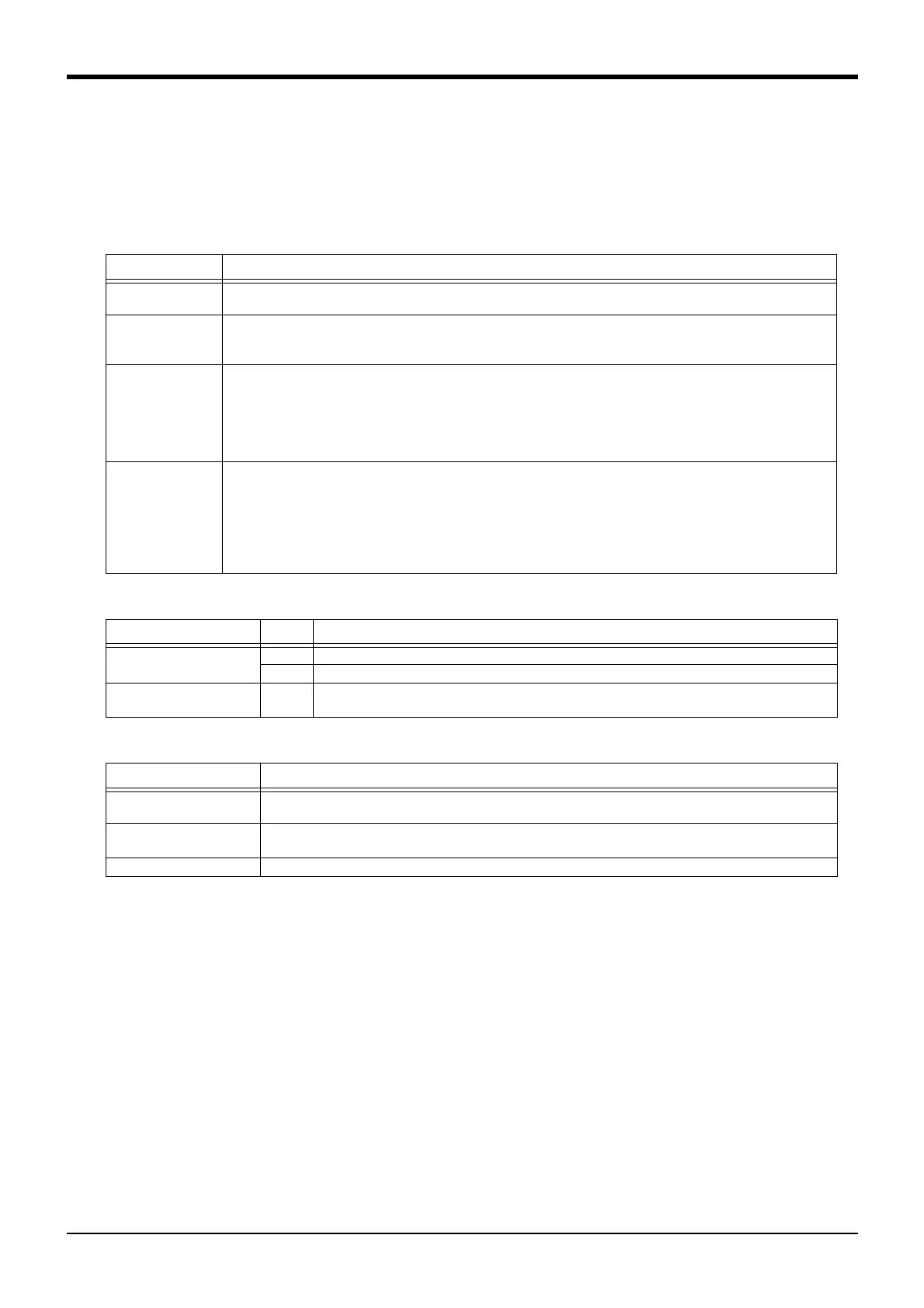
Table 5-14:Parameter List of the Warm-Up Operation Mode
Table 5-15:Dedicated I/O Signal List of Warm-Up Operation Mode
Table 5-16:Status Variable of Warm-Up Operation Mode
Parameter name Description and value
WUPENA Designate the valid/invalid of the Warm-up operation mode.
0:Invalid/ 1: Valid
WUPAXIS Specify the joint axis that will be the target of control in the warm-up operation mode by selecting bit ON or
OFF in hexadecimal (J1, J2, Åc from the lower bits).
Bit ON: Target axis/ Bit OFF: Other than target axis
WUPTIME Specify the time (unit: min.) to be used in the processing of warm-up operation mode. Specify the valid time in
the first element, and the resume time in the second element.
Valid time: Specify the time during which the robot is operated in the warm-up operation status and at a
reduced speed. (Setting range: 0 to 60)
Resume time: Specify the time until the warm-up operation status is set again after it has been canceled if a
target axis continues to stop. (Setting range: 1 to 1440)
WUPOvrd Perform settings pertaining to the speed in the warm-up operation status. Specify the initial value in the first
element, and the value constant time in the second element. The unit is % for both.
Initial value: Specify the initial value of an override (warm-up operation override) to be applied to the operation
speed when in the warm-up operation status. (Setting range: 50 to 100)
Ratio of value constant time: Specify the duration of time during which the override to be applied to the opera-
tion speed when in the warm-up operation status does not change from the ini-
tial value, using the ratio to the valid time. (Setting range: 0 to 50)
Parameter name Class Function
MnWUPENA (n=1t o 3)
(Operation right required)
Input Enables the warm-up operation mode of each mechanism. (n: FMechanism No.)
Output Outputs that the warm-up operation mode is currently enabled. (n: FMechanism No.)
MnWUPMD(n=1 to 3) Output Outputs that the status is the warm-up operation status, and thus the robot will operate at a
reduced speed. (n: FMechanism No.)
Status variable Function
M_Wupov Returns the value of an override (warm-up operation override) to be applied to the command speed in
order to reduce the operation speed when in the warm-up operation status.
M_Wuprt Returns the time during which a target axis in the warm-up operation mode must operate to cancel the
warm-up operation status.
M_Wupst Returns the time until the warm-up operation status is set again after it has been canceled.
 Loading...
Loading...


