4MELFA-BASIC IV
Detailed specifications of MELFA-BASIC V 4-132
4.3.12 Position constants
The syntax for position constants is as shown below. Variables cannot be described within position con-
stants.
Example)
P1=( 300, 100, 400, 180, 0, 180, 0, 0 ) ( 7, 0 )
P2=( 0, 0, -5, 0, 0, 0 ) ( 0, 0 ) [A case where there is no traveling axis data]
P3=( 100, 200, 300, 0, 0, 90 ) ( 4, 0 ) [A case of a 4-axis horizontal multi-joint robot]
(1) Coordinate, posture and additional axis data types and meanings
[Format] X, Y, Z, A, B, C , L1, L2
[Meaning] X, Y, Z: coordinate data. The position of the tip of the robot's hand in the XYZ coordinates.
(The unit is mm.)
A, B, C: posture data. This is the angle of the posture. (The unit is deg.)
Note1)
L1, L2: additional axis data. These are the coordinates for additional axis 1 and additional axis 2,
respectively. (The unit is mm or deg.)
Note1) The T/B and Personal computer support software display the unit in deg; however, the unit
of radian is used for substitution and calculation in the program.
(2) Meaning of structure flag data type and meanings
[Format] FL1, FL2
[Meaning] FL1: Posture data. It indicates the robot arm posture in the XYZ coordinates.
FL2: Multiple rotation data. It includes information of the rotational angle of each joint axis at the
position (XYZ) and posture (ABC) expressed as XYZ coordinates.
Default value = 0 (The range is 0 to +4294967295 ... Information for eight axes is held with a
1-axis 4-bit configuration.)Two types of screens are available for the PC: screens that dis-
play the number of rotations for each axis (-8 to 7) in decimal and those that display the
number of rotations for each axis in hexadecimal.
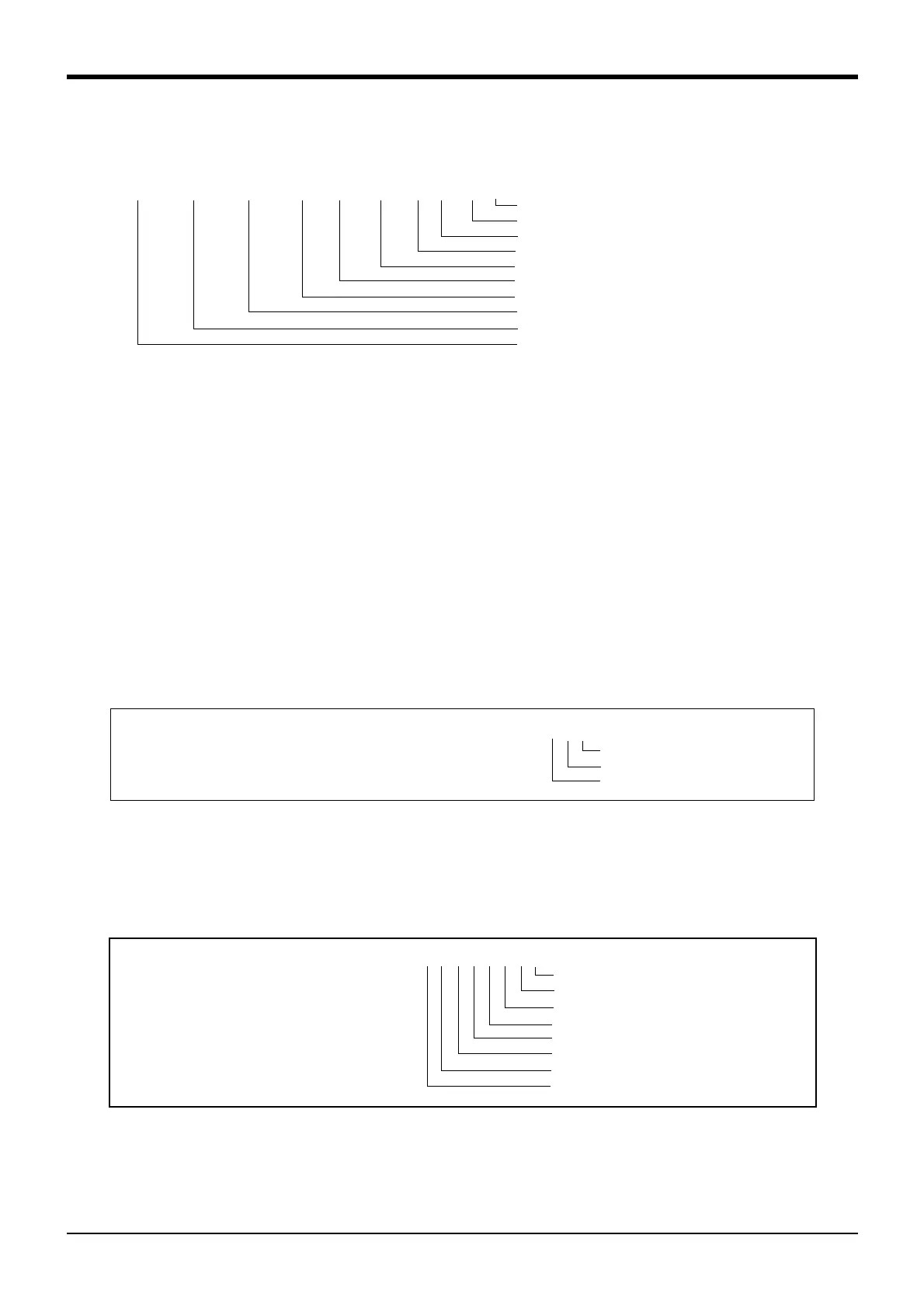
( 100, 100, 300, 180, 0, 180, 0, 0 ) ( 7, 0 )
C axis
B axis
Posture axes of the robot (degree)
A axis
Z axis
Y axis
Coordinate values of the hand tip (mm)
X axis
structure flag 2 (multi-rotation data)
structure flag 1 (posture data)
L2 axis (additional axis 2)
L1 axis (additional axis 1)
7 = & B 0 0 0 0 0 1 1 1 (Binary number)
1/0=NonFlip/Flip
1/0=Above/Below
1/0=Right/Left
0 = & H 0 0 0 0 0 0 0 0 (Hexadecimal number)
1 axis
2 axis
3 axis
4 axis
5 axis
6 axis (Most frequently used)
7 axis
8 axis
 Loading...
Loading...


