3Explanation of operation methods
Opening/Closing the Hands 3-26
3.3 Opening/Closing the Hands
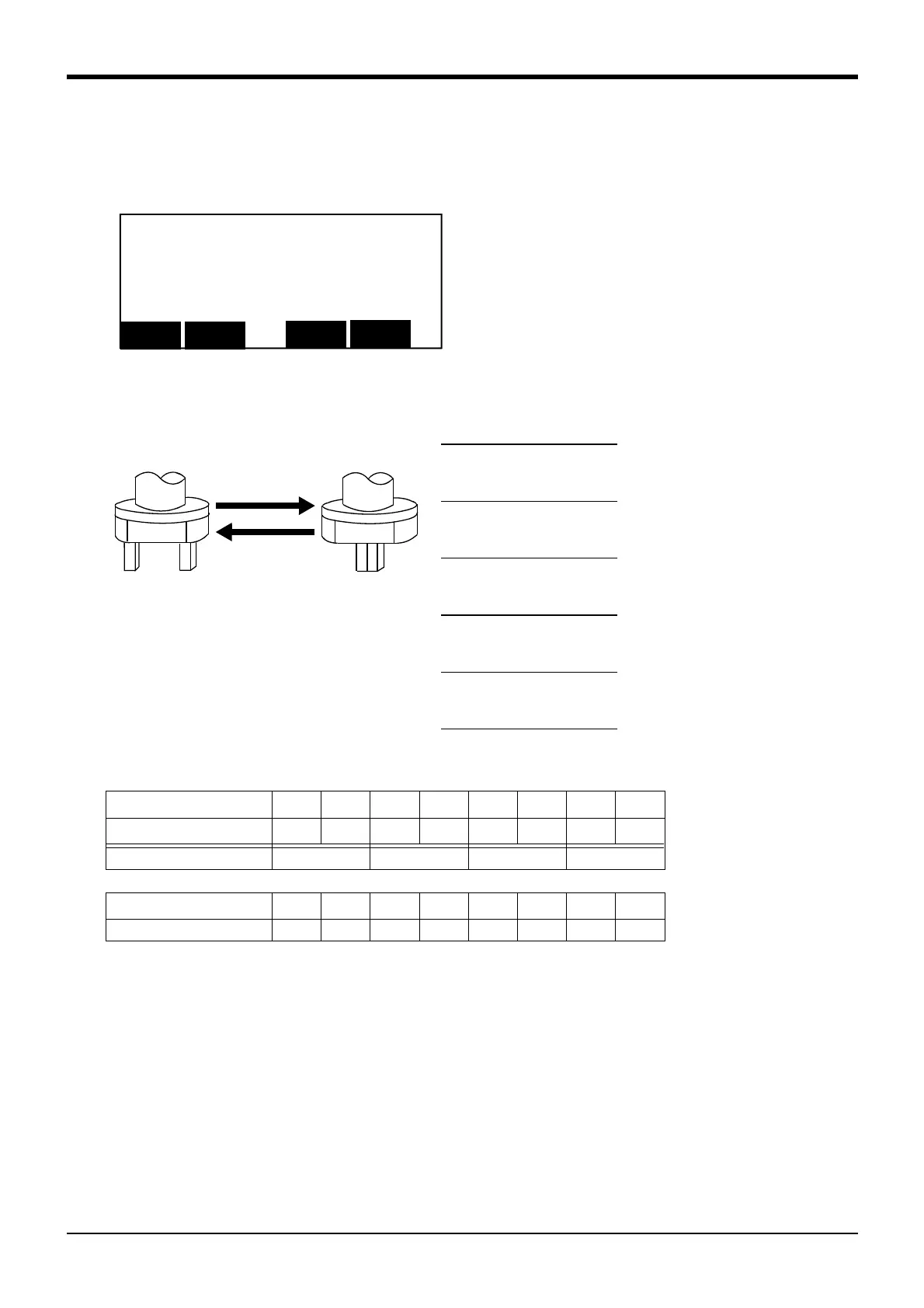
The open/close operation of the hands attached to on the robot is explained below.
Hands 1 to 6 can be opened and closed with the T/B.
Press the [HAND] key, and display the hand screen.
Opening and closing hand 1
Open: Press [+C ] key
Close: Press [-C ] key
Opening and closing hand
2
Open: Press [+B ] key
Close: Press [-B ] key
Opening and closing hand
3
Open: Press [+A ] key
Close: Press [-A ] key
Opening and closing hand
4
Open: Press [+Z ] key
Close: Press [-Z ] key
Opening and closing hand
5
Open: Press [+Y ] key
Close: Press [-Y ] key
Opening and closing hand
6
Open: Press [+X ] key
Close: Press [-X ] key
It is possible to mount various tools on the robot's hand area. In the case of pneumatic control, where the
solenoid valve (at double solenoid) is used, two bits of the hand signal is controlled by the open/close oper-
ation of the hand. For more information about the hand signal, please refer to Page 372, "5.12 About the
hand type" and Page 373, "5.13 About default hand status".
OUT-900 ~ OUT-907 7 6 5 4 3 2 1 0
Open/Close
Close Open Close Open Close Open Close Open
Hand number 4321
IN-900 ~ IN-907 7 6 5 4 3 2 1 0
Input signal
907 906 905 904 903 902 901 900
<HAND> ±C : HAND1 ±Z : HAND4
±B : HAND2 ±Y : HAND5
±A : HAND3 ±X : HAND6
76543210 76543210
OUT-900□□□□□□ IN-900□□□□□□
CLOSE
HND
ALIGN
SAFE
Open Close
[-C]
[+C]
 Loading...
Loading...


