5Functions set with parameters
About Standard Base Coordinates 5-366
5.7 About Standard Base Coordinates
When shifting the robot origin to a position other than the center position of the J1 axis of the robot, the con-
version is performed using the base coordinate system. The setting will be done from the following two
points. When base data is changed, the coordinates of teaching positions will be values based on the base
coordinate system.
1) Set in the MEXTL parameter.
2) Set in the robot program using the Base instruction.
The factory default setting value is set to zero at the base coordinate system position, which is identical to
the robot origin.
Structure of base coordinate system data: X, Y, Z, A, B, and C
X, Y and Z axis : The position of robot coordinate system from the base coordinate system origin
A axis : X-axis rotation in the base coordinate system
B axis : Y-axis rotation in the base coordinate system
C axis : Z-axis rotation in the base coordinate system
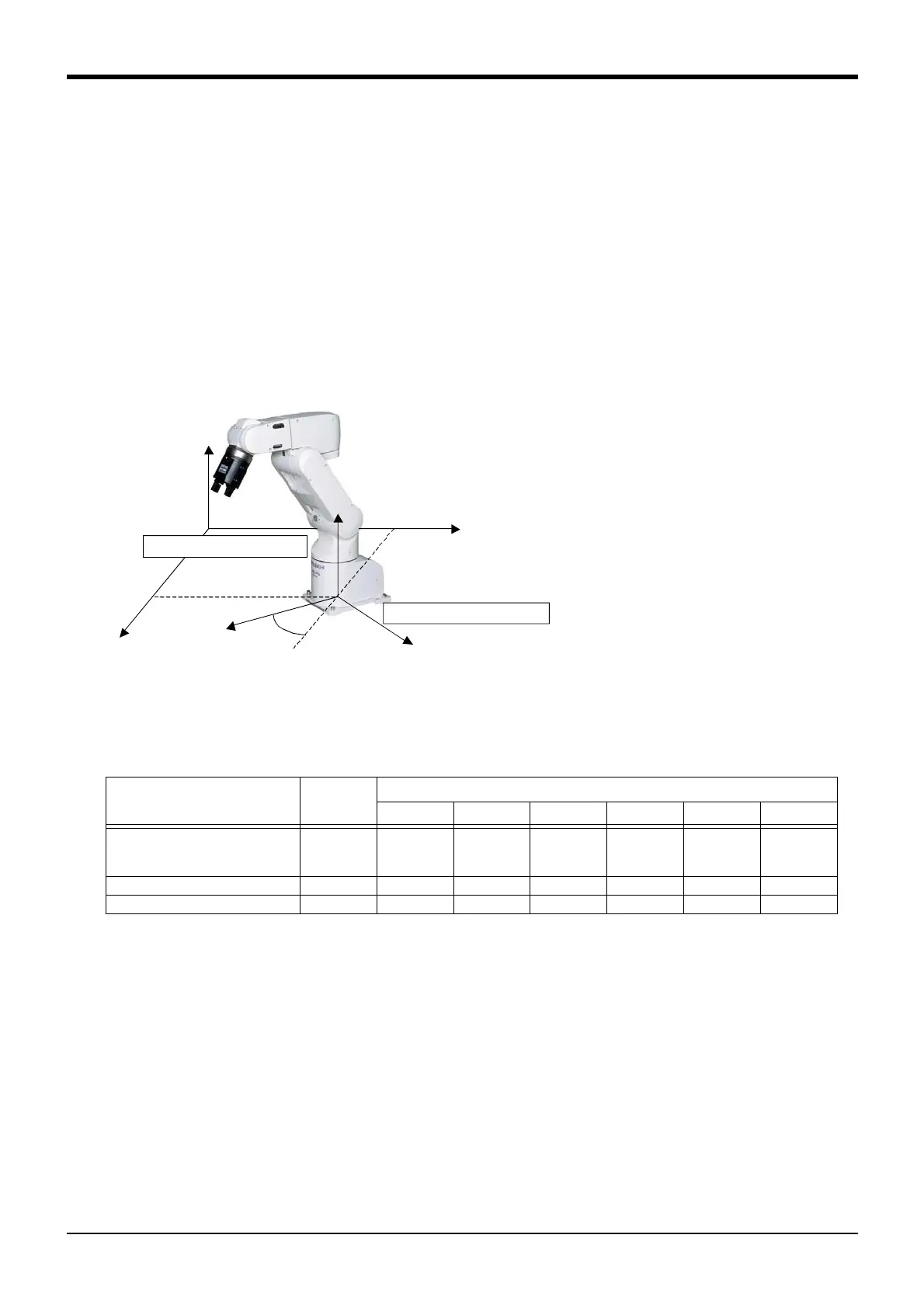
(Example)
1) Sample parameter setting
Parameter name: MEXBS
ValueÅF100,150,0,0,0,-30
2) Sample Base instruction setting
1 Base (100,150,0,0,0,-30)
Normally, the base coordinate system
need not be changed. If you wish to
change it, see the sample above when
configuring the system. Note that the
Base instruction within the robot pro-
gram may shift the robot to an unex-
pected position. Exercise caution when
executing the instruction.
An axis element of the base conversion data may or may not be valid depending on the robot model.
See Table 5-9 to set the appropriate data.
Table 5-9:Valid axis elements of the base conversion data depending on the robot model
Type
Number of
axis
An axis element of the base conversion data
Note1)
Note1) O: Valid, X: Invalid. This is meaningless and ignored if set., X: The setting value is fixed to 0.
XYZABC
RV-3SQ/3SD
RV-6SQ/6SQL/6SD/6SDL
RV-12SQ/12SQL/12SD/SDL
6OOOOOO
RV-3SQJ/3SDJ 5 O O O X X X
RH-6SDH/12SDH/18SDH 4 O O O X X O
Zr
Yr
Xr
Zb
Yb
Xb
Cr
150mm
100mm
-30°
Base coordinate system:Xb,Yb,Zb
Robot coordinate system:Xr,Yr,Zr
 Loading...
Loading...


