3Explanation of operation methods
Jog Feed (Overview) 3-20
screen together with the sound of buzzer to warn the operator. It is possible to set this function valid or
invalid by parameter MESNGLSW. (Refer to Page 343, "5 Functions set with parameters".) Please refer to
Page 379, "5.17 About the singular point adjacent alarm" for details of this function.
3.2.2 Speed of jog feed
The current speed (%) is displayed on the screen. To change these values, press either the [OVRD ↑] /
[OVRD ↓
] key. The following types of jog feed speed are available.
[[
OVRD ↑ ] key -------------------------------------------------- [OVRD ↓ ] key
LOW and HIGH are fixed-dimension feed. In fixed-dimension feed, the robot moves a fixed amount every
time the key is pressed. The amount of movement depends on the individual robot.
Table 3-2:Fixed-dimension of
RV-6SD
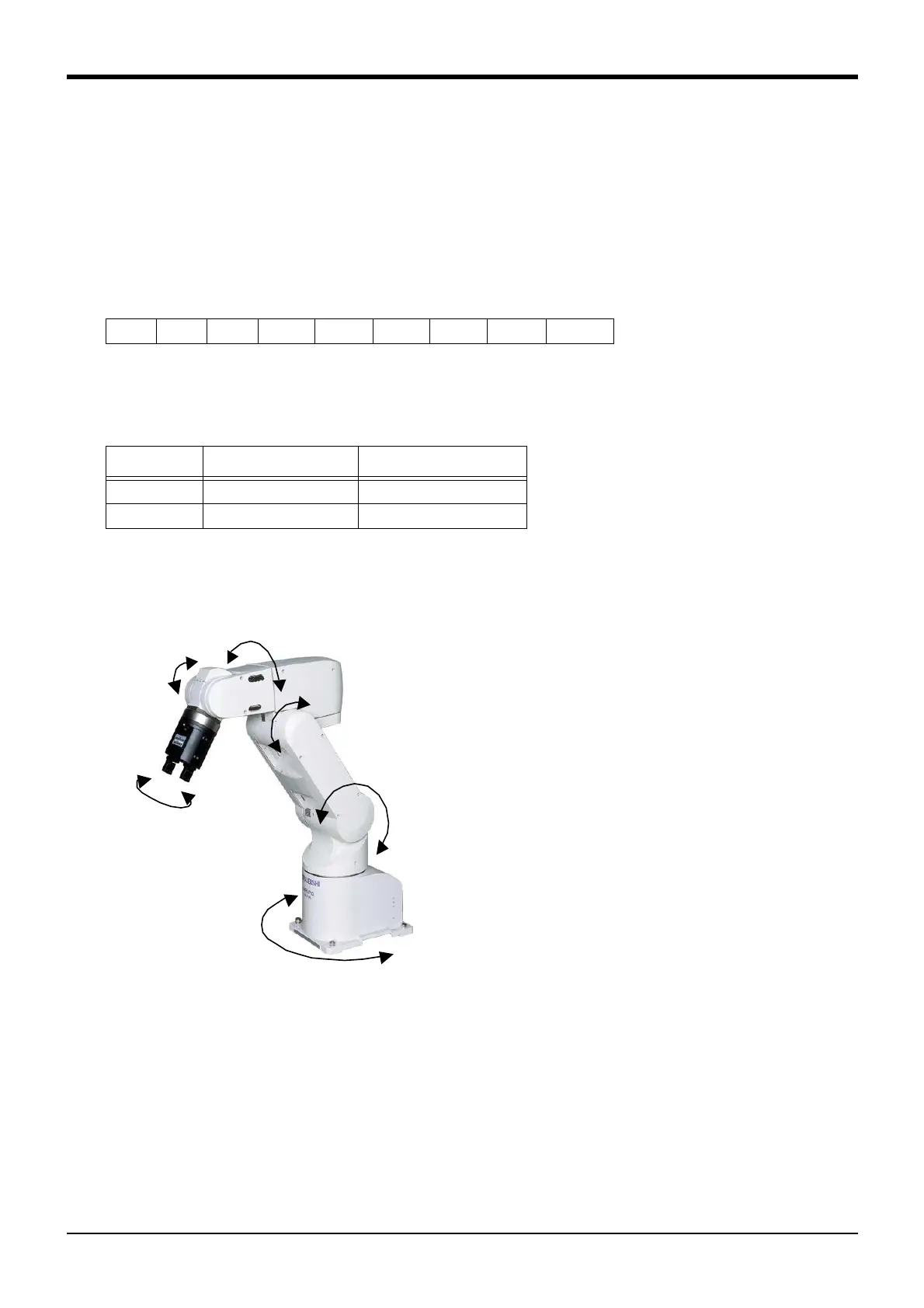
3.2.3 JOINT jog
Adjusts the coordinates of each axis independently in angle units.
LOW HIGH 3% 5% 10% 30% 50% 70% 100%
JOINT jog TOOL, XYZ jog
LOW 0.01 deg. 0.01 mm
HIGH 0.10 deg. 0.10 mm
+J1
ーJ1
+J2
-J2
+J4
-J3
-J4
+J5
-J5
+J3
+J6
-J6
 Loading...
Loading...


