5-365 Standard Tool Coordinates
5Functions set with parameters
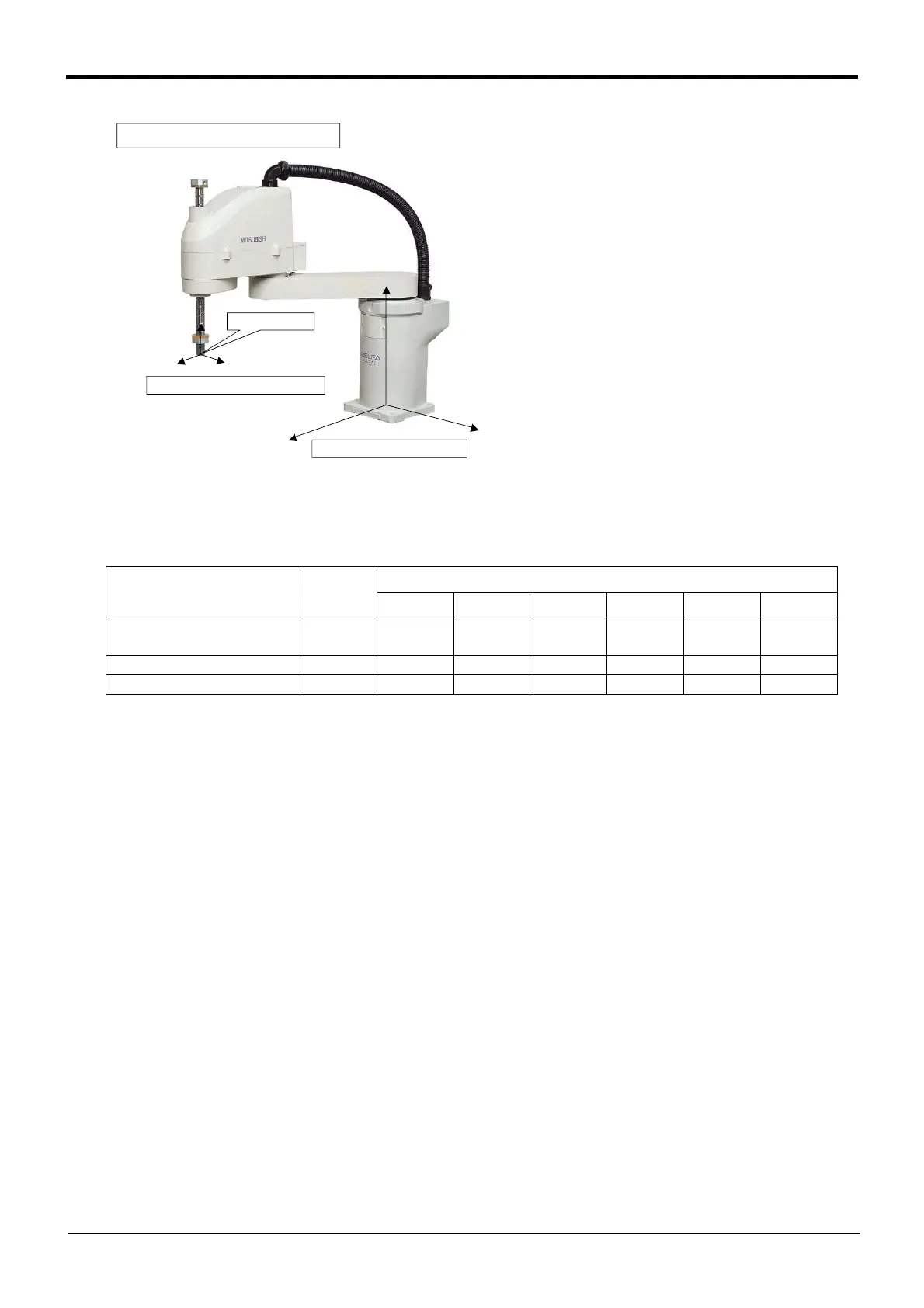
<A case for a horizontal 4-axis robot>
1) Sample parameter setting
Parameter name: MEXTL
Value: 0, 0, -10, 0, 0, 0
2) Sample Tool instruction setting
1 Tool (0,0,-10,0,0,0)
Horizontal 4-axis robots can basically
offset using parallel shifting. Note that
the orientation of the tool coordinate
system is set up differently from that
of vertical robots.
An axis element of the tool conversion data may or may not be valid depending on the robot model.
See Table 5-8 to set the appropriate data.
Table 5-8:Valid axis elements of the tool conversion data depending on the robot model
Type
Number of
axis
An axis element of the tool conversion data
Note1)
Note1) O: Valid, X: Invalid. This is meaningless and ignored if set., X: The setting value is fixed to 0.
If a value other than 0 is set, operation may be adversely affected.
XYZABC
RV-3SD, RV-6SD,
RV-12SD/SDL, RV-18SD
6OOOOOO
RV-3SDJ 5 X X O X X X
RH-6SDH/12SDH/18SDH 4 O O O X X O
Zt
Yt
Xt
Xr
Yr
Zr
A case for a horizontal 4-axis robot
Mechanical interface
Default tool coordinate system:Xt,Yt,Zt
Robot coordinate system:Xr,Yr,Zr
 Loading...
Loading...


