4-221 Detailed explanation of command words
4MELFA-BASIC IV
[Explanation]
(1) In circular interpolation motion, a circle is formed with three given points, and robot moves along the cir-
cumference.
(2) The posture is interpolation from the start point to the end point; the reference point posture has no
effect.
(3) If the current position and start point do not match, the robot will automatically move with linear interpola-
tion (3-axis XYZ interpolation) to the start point.
(4) If paused during execution of a Mvr instruction and restarted after jog feed, the robot returns to the
interrupted position by JOINT interpolation and restarts the remaining circle interpolation.
The interpolation method (JOINT interpolation / XYZ interpolation) which returns to the interrupted
position can be changed by the "RETPATH" parameter. (Refer to Page 369, "5.10 Automatic return set-
ting after jog feed at pause")
(5) The direction of movement is in a direction that does not pass through the reference points.
(6) If the start point and end point structure flags differ when equivalent rotation (constant 2 = 0) is specified,
an error will occur at the execution.
(7) Of the three designated points, if any points coincide with the other, or if three points are on a straight
line, linear interpolation will take place from the start point to the end point. An error will not occur.
(8) If 3-axis XYZ is designated for the constant 2, the constant 1 will be invalidated, and the robot will move
with the taught posture.
(9) Constant 2 designates the posture interpolation type. 3-axis XYZ is used when carrying out interpolation
on the (X, Y, Z, J4, J5, J6) coordinate system, and the robot is to move near a particular point.
(10) This instruction cannot be used in a constantly executed program.
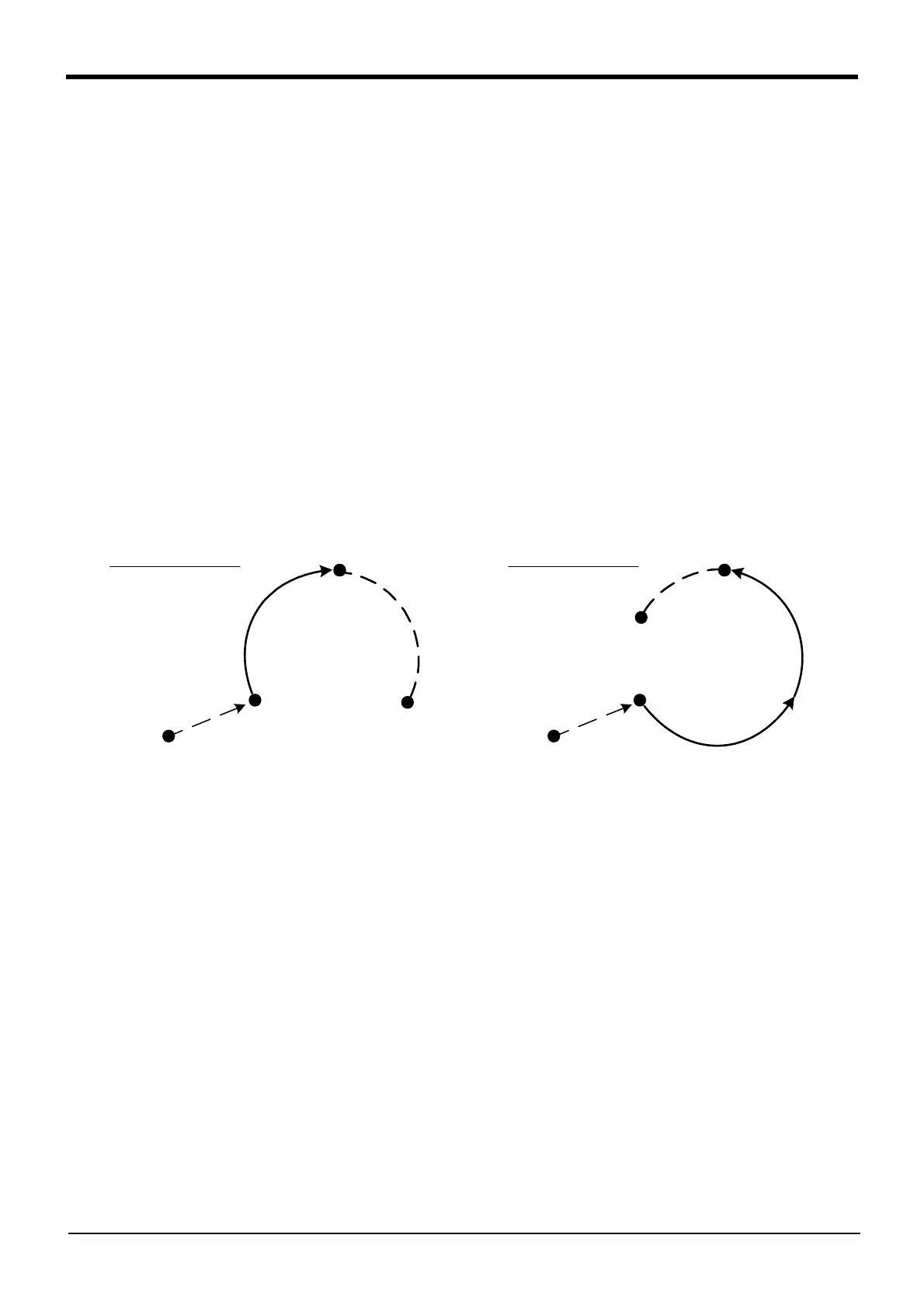
Fig.4-13:Example of circular interpolation motion path 2
P2
P1 P3
MVR2 P1, P2, P3
Moves by XYZ
interpolation (3-axis
XYZ interpolation)
P2
P1
P4
MVR2 P1, P2, P4
P_CURR
P_CURR
Moves by XYZ
interpolation (3-axis
XYZ interpolation)
 Loading...
Loading...


