5Functions set with parameters
Command parameter 5-362
Set the delay
time of the GC/
GO command
and the moving
command.
*This parameter
is valid for
using the
MOVEMAS-
TER command
only.
HANDDLY Integer 1 The delay time of hand open/close in MOVEMASTER command is the
time specified by GP command. (Default value is 0.3 sec.)
The delay time of hand open/close can be specified by this parameter.
The units of the delay time specified by GP command are 1 / 10 sec-
onds.
The units of the delay time specified with this parameter are 1 / 1000
seconds (=msec).
-1
Robot language
setting
RLNG Integer 1 Select the robot language
2:MELFA-BASIC V
1:MELFA-BASIC IV
1
Display lan-
guage
Note1)
LNG Character
string 1
Set up the display language.
"JPN":Japanese
"ENG":English
The following language is changed.
(1)The display LCD of teaching pendant.
(2) Personal computer support software.
*alarm message of the robot.
*Parameter explanation list.
(3)Alarm message that read from the robot with external communica-
tion. (Standard RS232C, Extended serial I/F, Ethernet I/F)
The "JPN" is
Japanese spec-
ification.
The "ENG" is
English specifi-
cation.
Extension of
external vari-
able
PRGGBL - Sets "1" to this parameter, and turns on the controller power again, then
the capacity of each program external variable will double.
However, if a variable with the same name is being used as a user-
defined external variable, an error will occur when the power is turned
ON, and it is not possible to expand. It is necessary to correct the user
definition external variable.
0
Note1) The parameter is set up based on the order specifications before shipment.
Order to dealer when the instruction manual of the other language is necessity.
More, the caution seals that stuck on the robot arm and the controller are made based on the
language of the order specification. Use it carefully when selecting the other language.
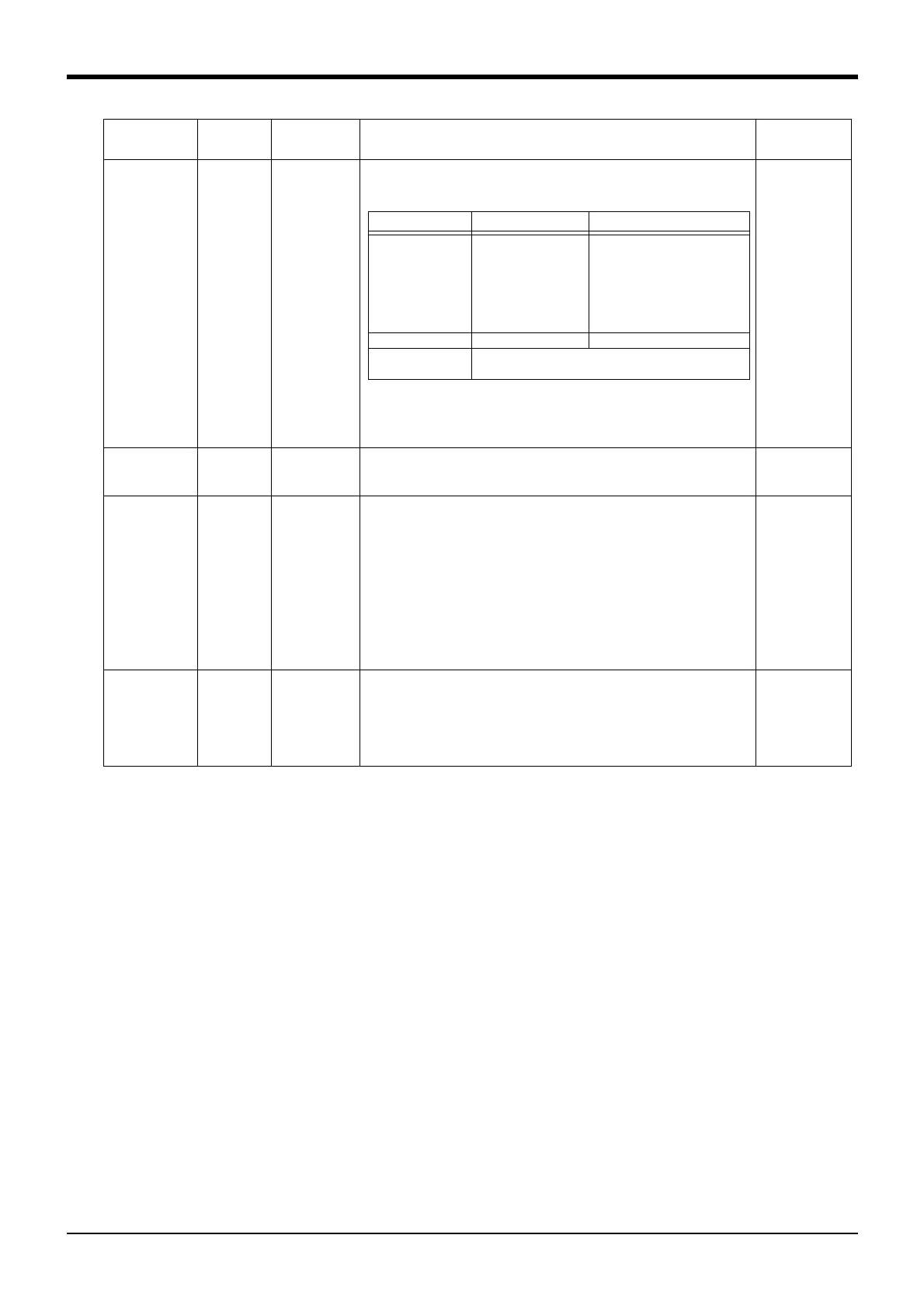
Parameter
Parameter
name
No. of arrays
No. of characters
Details explanation Factory setting
Parameter value Motorized hand Pneumatic hand
-1 When the status of
the hand changes,
the delay timer
specified by GP
command is taken.
The delay time specified
by the GP instruction is
stored in this parameter
when opening/closing the
hand, regardless of
whether or not the hand
status has changed.
0 No delay No delay
Value
Unit(msec)
When the status of the hand changes, the delay
timer specified with this parameter is taken.
 Loading...
Loading...


