5Functions set with parameters
Warm-Up Operation Mode 5-394
*Methods to Check the Warm-Up Operation Status
Whether the current status is the warm-up operation status or normal status can be checked in the following
three methods:
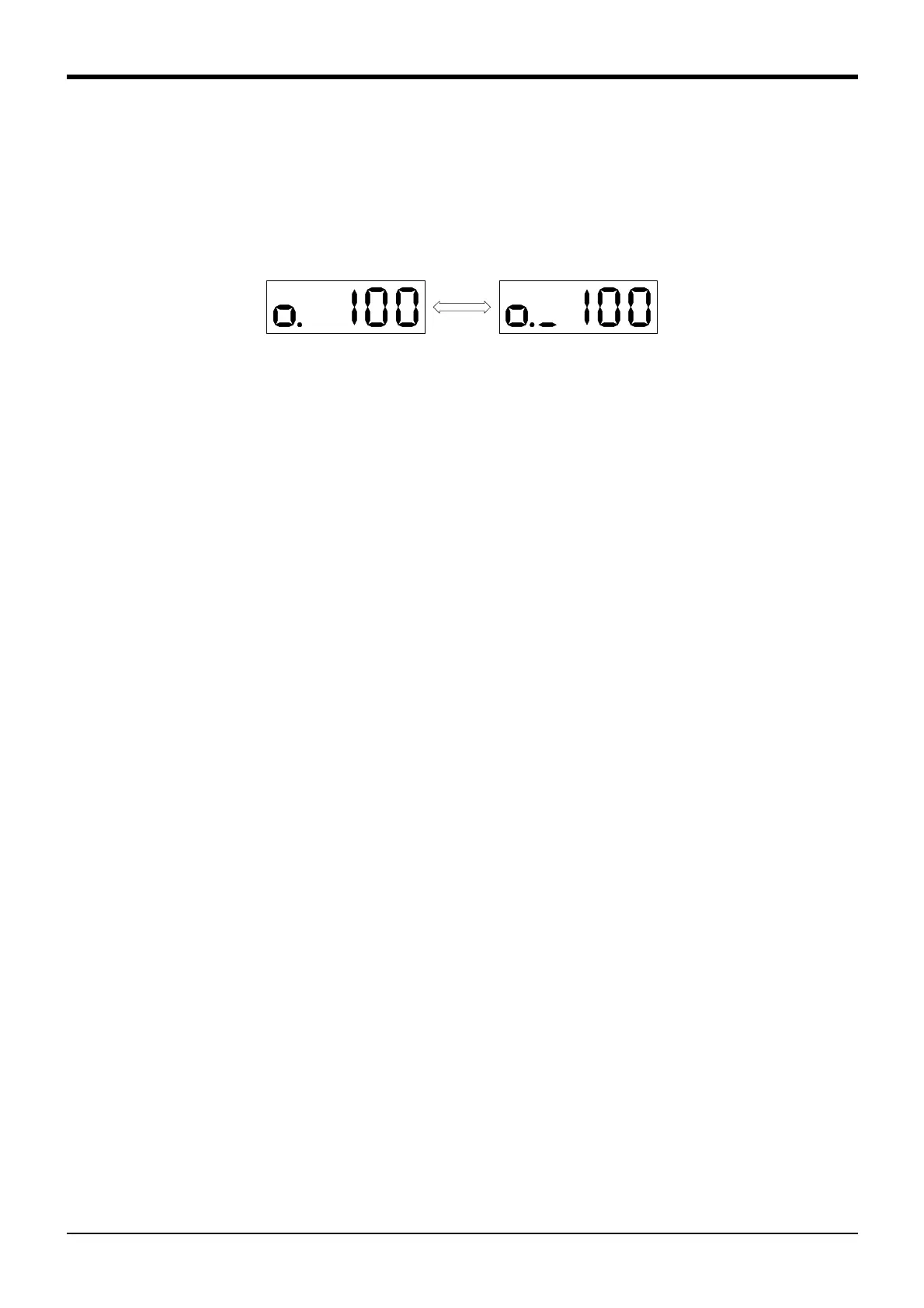
• Checking with STATUS NUMBER on the controller's front panel
The current status can be checked by setting STATUS NUMBER to override display. In the warm-up oper-
ation status, an underscore (_) is displayed in the second digit from the left.
Fig.5-5:Override Display in the Warm-Up Operation Status
• Checking with a status variable
The current status can be checked by monitoring the value of the M_Wupov status variable (the value of a
warm-up operation override). In the normal status, the value of M_Wupov is set to 100%; in the warm-up
operation status, it is below 100%.
• Checking with a dedicated output signal
In the warm-up operation status, the MnWUPMD (n = 1 to 3: mechanism number) dedicated output signal is
output.
*Switching Between the Normal Status and the Warm-Up Operation Status
When in the warm-up operation status, if a target axis in the warm-up operation mode continues operating
and its operation time exceeds the valid time of the warm-up operation status, the warm-up operation status
is canceled and the normal status is set. Thereafter, if the robot continues to stop, the joint section is cooled
down in a low temperature environment. When a target axis continues to stop over an extended period of
time and the resume time of the warm-up operation status is exceeded, the normal status switches to the
warm-up operation status again.
• Canceling the warm-up operation status
If the accumulated time a target axis has operated exceeds the valid time of the warm-up operation status,
the warm-up operation status is canceled and the normal status is set. Specify the valid time of the warm-up
operation status in the first element of the WUPTIME parameter. (The setting value at shipment from the
factory is 1 min.) If a multiple number of target axes exist, the warm-up operation status is canceled when all
target axes exceed the valid time. Note that, with the M_Wuprt status variable, you can check when the
warm-up operation status will be canceled after how much more time a target axis operates.
• Switching from the normal status to the warning-up operation status
If the time during which a target axis continues to stop exceeds the resume time of the warm-up operation
status, the normal status switches to the warm-up operation status. Specify the resume time of the warm-up
operation status in the second element of the WUPTIME parameter. (The setting value at shipment from the
factory is 60 min.)
If a multiple number of target axes exist, the warm-up operation status is set when at least one of the axes
exceeds the resume time of the warm-up operation status.
Note that, with the M_Wupst status variable, you can check when the status is switched to the warm-up
operation status after how much more time a target axis continues to stop.
Note: If a target axis is not operating even when the robot is operating, it is determined that the target axis is
stopping.
Normal Status Warm-Up Operation Status
 Loading...
Loading...


