About Tuning
Model 493.02 Controller Service
Tuning
201
Integral gain (I) Integral gain introduces “an integral of the error signal” that gradually,
over time, boosts the low-frequency response of the servovalve
command.
Integral gain increases system response during static or low-frequency
operation and maintains the mean level at high-frequency operation. It
can offset a DC or steady-state error, such as that caused by valve
imbalance.
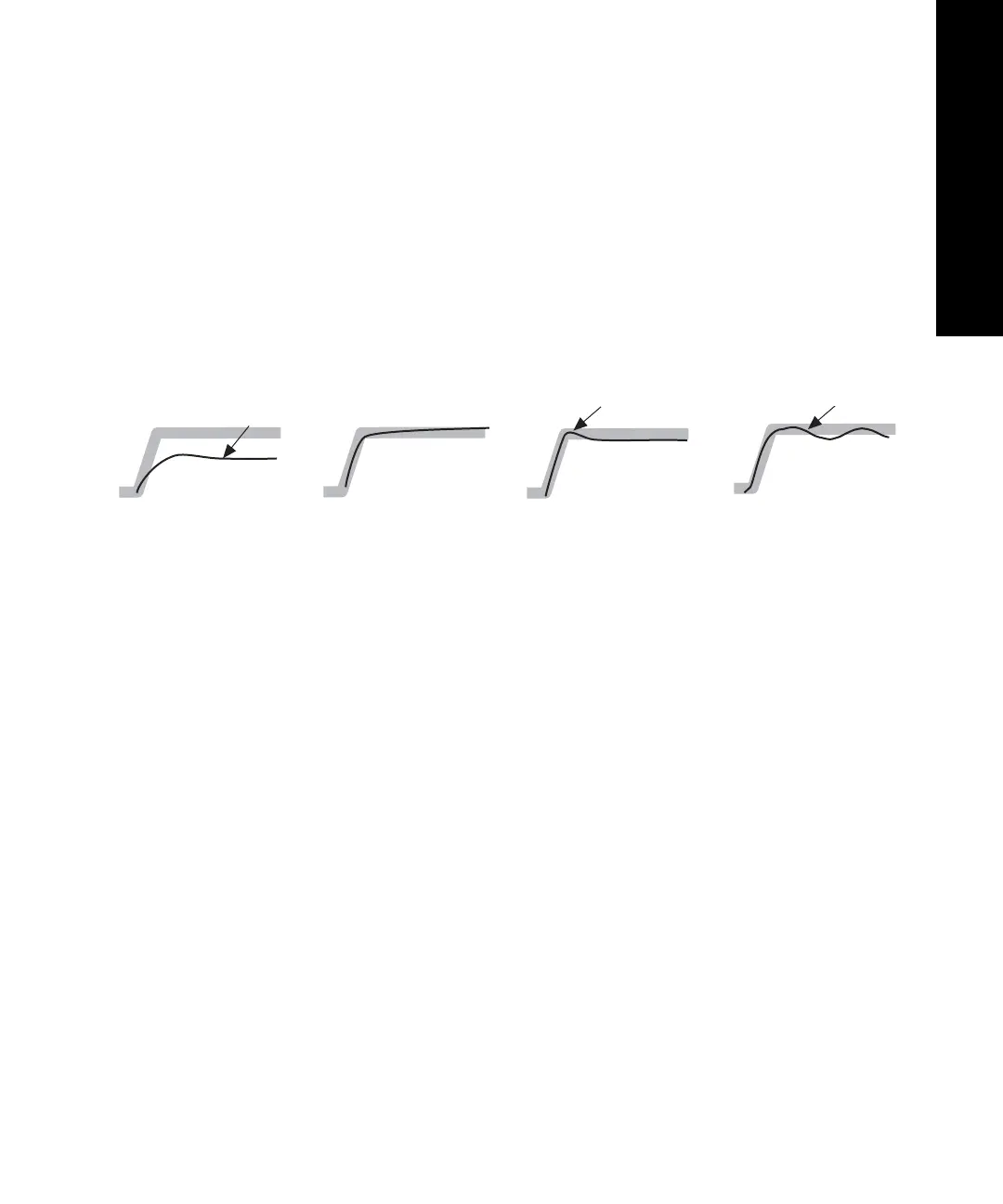
The following ramp and hold waveforms illustrate different levels of
reset. The I Gain adjustment determines how much time it takes to
improve the mean level accuracy.
Integral gain:
• Improves mean level response during dynamic operation
• Corrects feedback droop caused by the spring characteristic of the
servovalve in static and very low-frequency test programs
• Minimizes the amount of time the system needs to recover from
transitions or transients
Keep in mind:
• Higher integral gain settings increase system response.
• Too much integral gain can cause a slow oscillation (hunting).
• You may want to use the max/min display to monitor the mean
level, reset the display, and check it again.
I Gain Too Low Optimum I Gain I Gain Too High Excessive I Gain
Droop
Overshoot Hunting
 Loading...
Loading...