7.7 The Map menu
Narda IDA-3106 153
7.7.12 Measurement uncertainty (Bearing Uncertainty)
Direction Finding • Map • Average Position
Measurement inaccuracies occur when taking bearings, mainly due to
reflections and multipath propagation. Minor inaccuracies are also caused
by GPS and compass deviations. These uncertainties can be taken into
account using the Bearing Uncertainty function and included in the
calculation of the signal location.
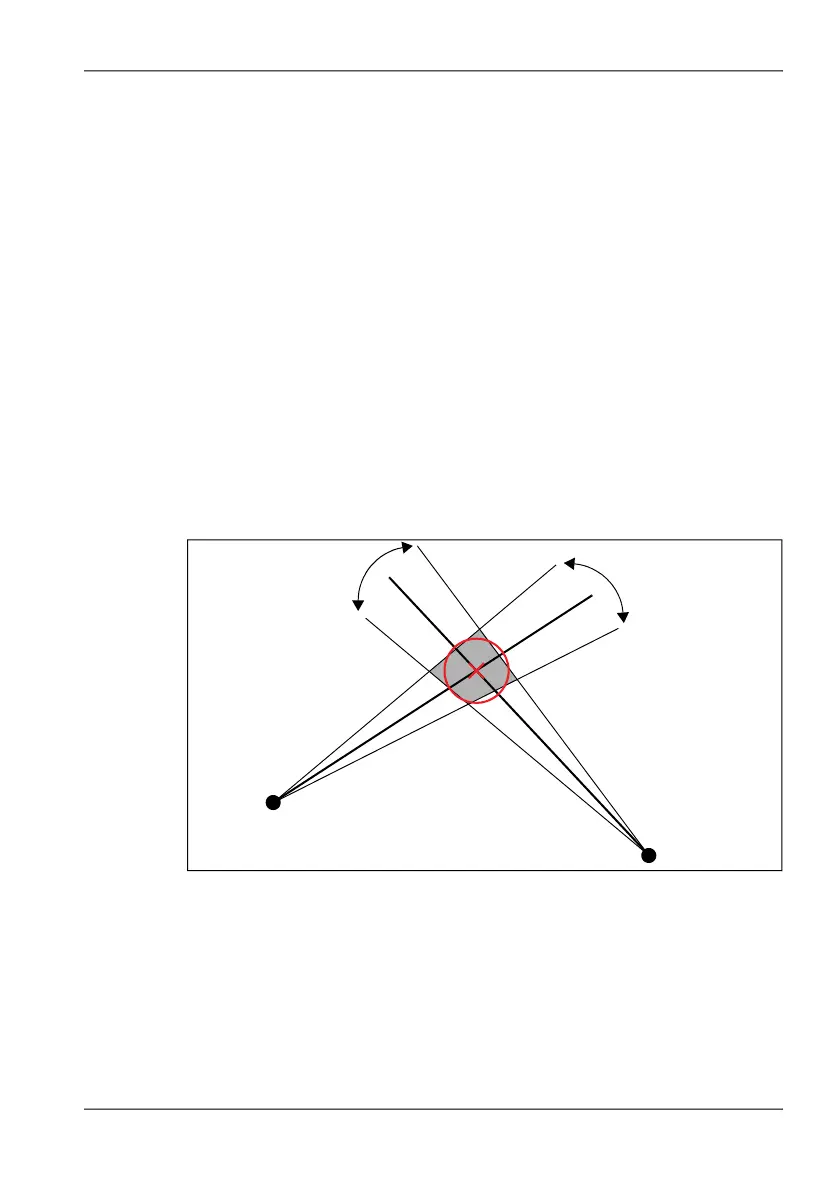
The uncertainty is defined by an angle that widens the bearing line by the
selected value. Values between 1° and 15° can be selected. The default
value is an angle of 5°. When triangulation is performed, the intersection of
these open triangular areas encompasses an area within which the signal
location lies (indicated by the red circle). If a greater uncertainty is selected,
the diameter of the circle around the calculated location increases
accordingly.
The default value of 5° should be sufficient in most cases. The value can be
increased appropriately if large compass deviations occur due to magnetic
fields or metallic objects.
Figure 30: Effect of measurement uncertainty (Bearing Uncertainty) on the
calculation of the signal location. An uncertainty of 5° is selected in this
example.
To change the bearing uncertainty:
1. Press the Bearing Uncertainty softkey in the Average Position display.
2. Select a value using the rotary control knob and press OK to confirm.
5° (±2.5°)
5° (±2.5°)