274
Pulse Outputs Section 5-3
Origin Return
Acceleration Rate
Sets the motor's acceleration rate when the origin return operation starts.
Specify the amount to increase the speed (Hz) per 4-ms interval.
Origin Return
Deceleration Rate
Sets the motor's acceleration rate when the origin return function is decelerat-
ing. Specify the amount to decrease the speed (Hz) per 4-ms interval.
Executing an Origin Return
Note An instruction execution error will occur if the origin is not determined (relative
coordinate system) when ORG(889) is executed to perform an origin return
operation.
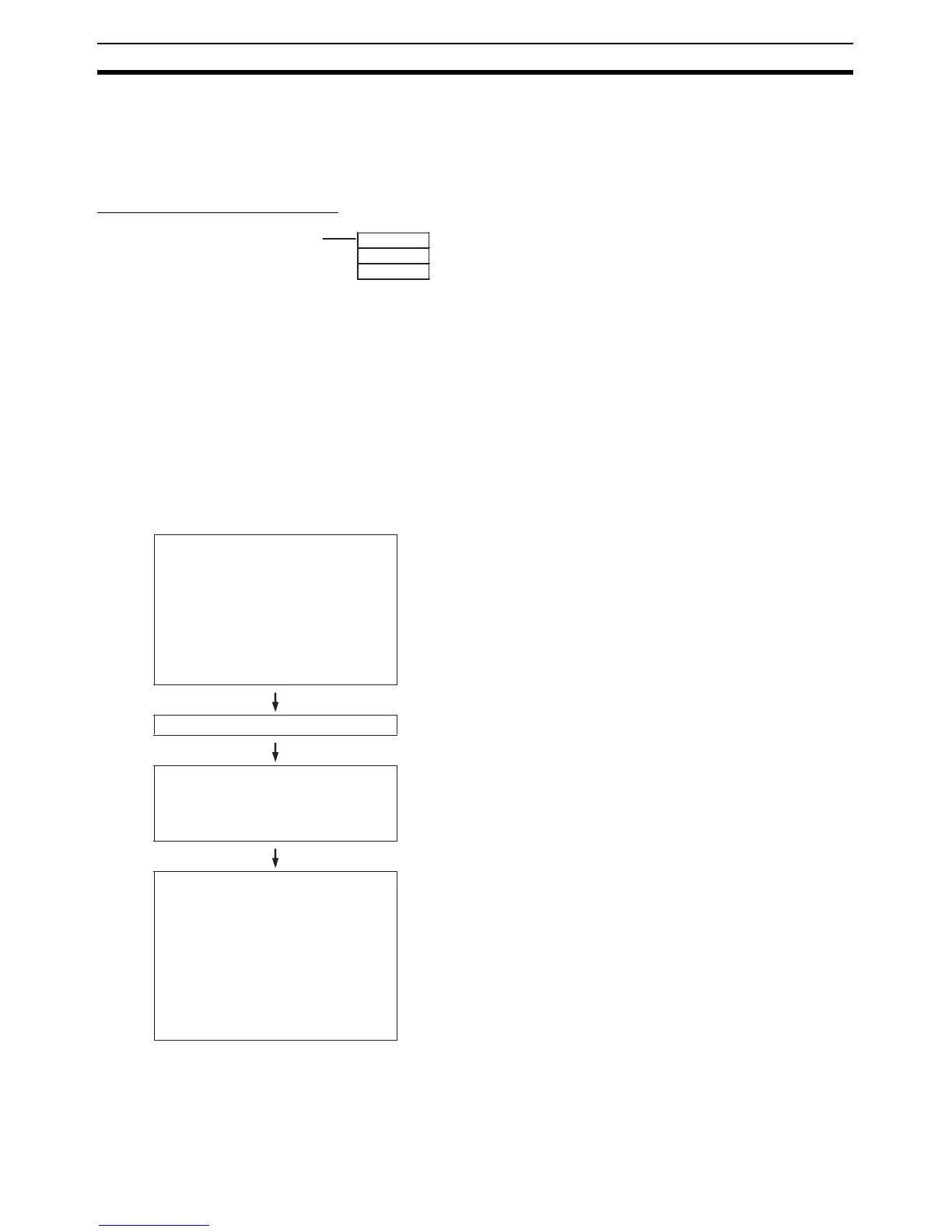
5-3-7 Pulse Output Procedures
Single-phase Pulse Output without Acceleration/Deceleration
The number of output pulses setting cannot be changed during positioning.
■ PULS(886) and SPED(885)
P
C
ORG(889)
P: Port specifier (Pulse output 0: #0000, Pulse output 1: #0001)
Pulse output 0: #0000
Pulse output 1: #0001
Pulse output 2: #0002
Pulse output 3: #0003
C: Control data
(Origin return and CW/CCW method: #1000, Origin search and pulse
+ direction method: #1100)
Determine the pulse output method,
output frequency, and port.
• Pulse output method
• CW/CCW inputs: Pulse outputs 0 to 3
• Pulse + direction inputs: Pulse outputs 0 to 3
Pulse outputs 0 and 1 use the same pulse output method.
• Output frequency
• X/XA models:
Unit version 1.1 or later
1 Hz to 100 kHz (1 Hz units), 4 outputs
Unit version 1.0 or earlier
Pulse outputs 0 and 1: 1 Hz to 100 kHz (1 Hz units)
Pulse outputs 2 and 3: 1 Hz to 30 kHz (1 Hz units)
• Y models:
Pulse outputs 0 and 1: 1 Hz to 1 MHz (1 Hz units)
Pulse outputs 2 and 3: 1 Hz to 100 kHz (1 Hz units)
Wire the outputs.
PLC Setup settings
• Enable/disable the origin search function. Set the
various origin search parameters if the origin search
function is enabled.
Ladder program
• PULS(886): Specify port number and set the number of
output pulses.
• SPED(885): Specify port number and set the output
method (CW/CCW method or Pulse + direction method)
and pulse output control without acceleration/deceleration.
• INI(880): Specify port number and stop pulse output when
necessary.
• PRV(881): Specify port number and read pulse output PV
when necessary.