5 Motion Control Parameters
5-14
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
Precautions for Correct UsePrecautions for Correct Use
• Set to use the reducer if you use the Count Mode to Rotary Mode.
When you set not to use the reducer, the number of pulses for one cycle of the ring counter
may not be an expected integer because of a calculation error for one cycle of the ring
counter when converted to pulses. The unexpected integer may cause the position offset.
• When you make a change in the unit conversion settings, except for a change in the unit of
display conversion, there are some differences between the physical position of the machine
and the command current position of the MC Function Module. Therefore, if you made a
change in the unit conversion settings, execute the Home instruction to define the home
again.
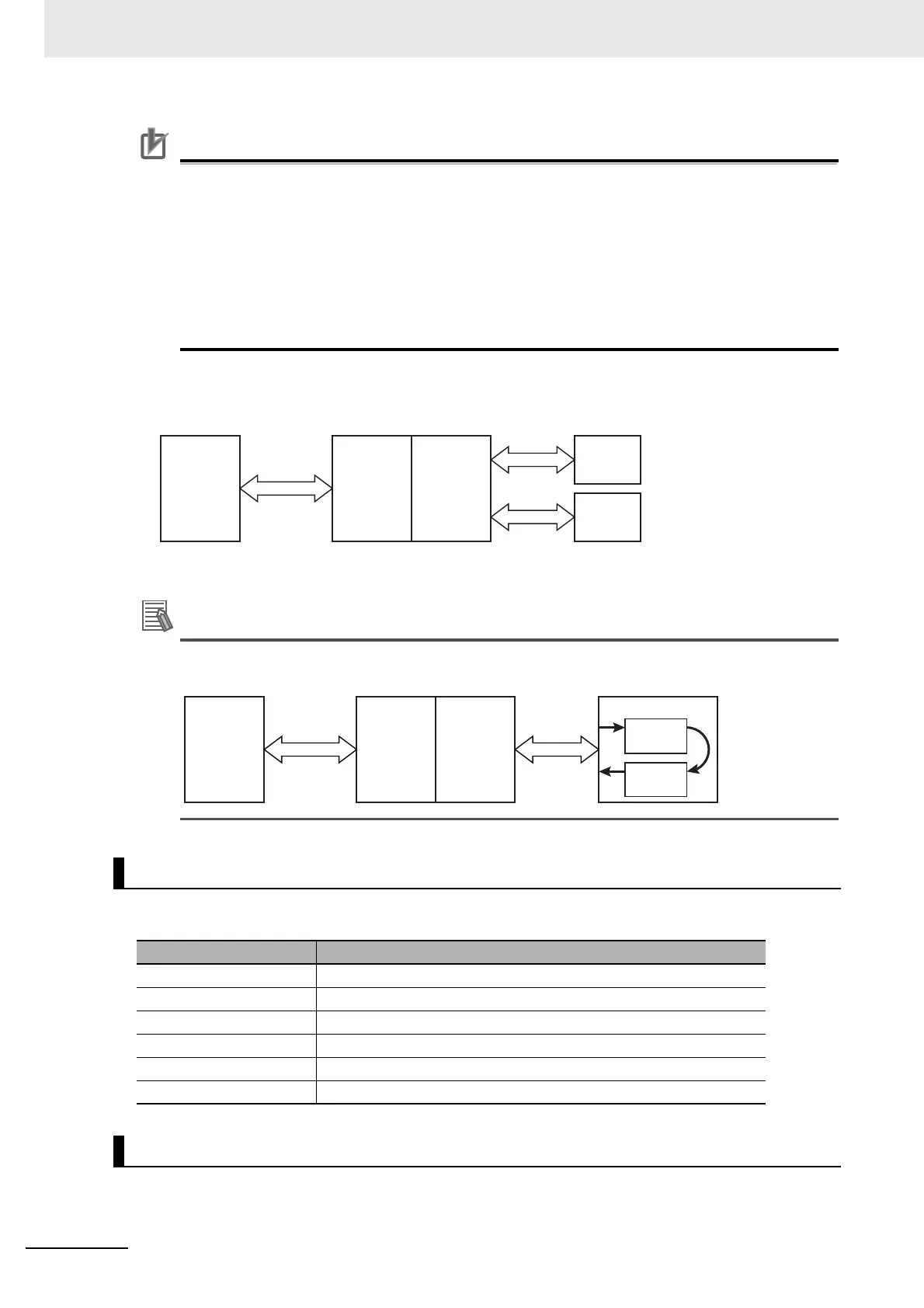
Positions are generally given in pulses between the MC Function Module and Servo Drives or
encoder input terminals. Use a display unit of millimeters or degrees for motion control instructions
so that you can easily understand the operation.
You can use the Unit of Display parameter and electronic gear (unit conversion formula) settings to
change from a pulse unit to millimeters or degrees.
For a virtual servo axis, the command current value is converted to pulses and then that value is
converted to the unit of display. The resulting value is used as the actual current value.
You can use the Unit of Display parameter to set the unit to display on the Sysmac Studio. The display
shows the position’s display unit. The following table describes the units you can set.
When you set to use the reducer, the following condition must be met to use the unit conversion
settings.
Unit of Display
Unit Description
pulse Use this unit to express values in pulses.
mm Use this unit for comparatively long-distance direct operation.
μm Use this unit for precise direct operation.
nm Use this unit for more precise direct operation than μm.
degree Use this unit for rotary tables or other rotating axes.
inch Use this unit for direct operation.
Conditions to Use Reducers
User
program
Motion
control
instructions
MC
Function
Module
Servo
Drive
Encoder
Input
Terminal
Position
increment
Pulses
Pulses
User
program
Command
position
Actual
position
Position
increment
Motion
control
instruction
MC
Function
Module
Pulses

 Loading...
Loading...







