5 Motion Control Parameters
5-18
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
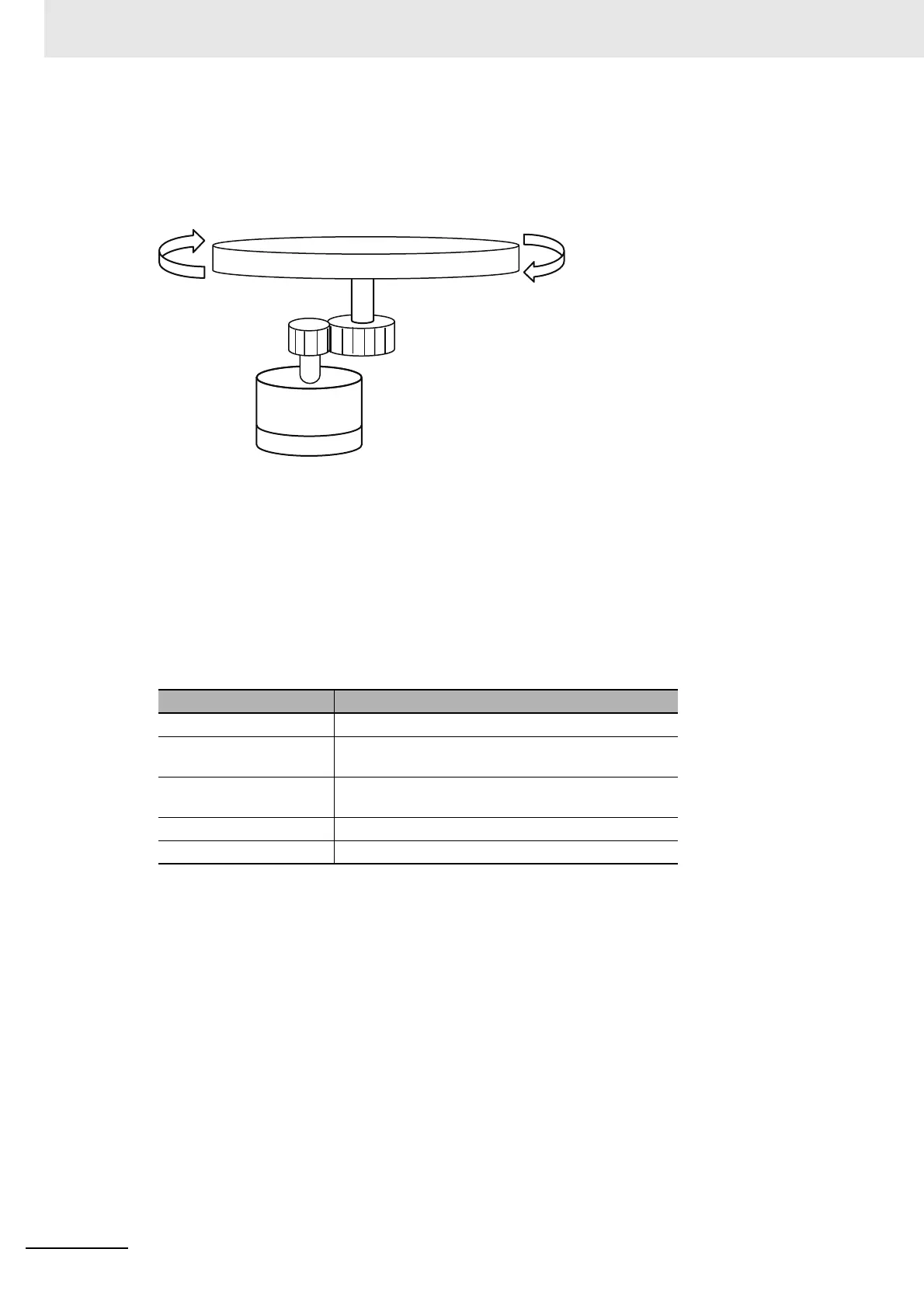
In this example 1, an OMRON 1S-series Servomotor with a 23-bit absolute encoder is used.
Mechanically, the reduction ratio of the reducer is 3/5 and the workpiece moves 360 degree for
every rotation of the turntable.
The Unit of Display parameter is set to
degree. The Command Pulse Count Per Motor Rotation is set
to the resolution of the encoder on the Servomotor.
The Work Travel Distance Per Rotation is automatically determined and set by the result of “Modulo
maximum position - Modulo minimum position”.
A reducer with a reduction ratio of 3/5 is used, so the turntable (or workpiece) turns three times for
every five rotations of the Servomotor. For this reduction ratio setting, the work gear ratio is set to 3
and the motor gear ratio is set to 5.
With these settings, the command unit for positions in the user program is 1 degree.
For example, to move to an absolute position of 100.5
degree, the Position (Target Position) input
variable to the MC_MoveAbsolute (Absolute Positioning) instruction is set to 100.5.
Parameter name Setting
Unit of Display degree
Command Pulse Count
Per Motor Rotation
8,388,608
Work Travel Distance Per
Rotation
Modulo maximum position - Modulo minimum position
Work Gear Ratio 3
Motor Gear Ratio 5
Reduction ratio: 3/5
Servomotor encoder
resolution: 23 bits/rotation
(8,388,608 pulses per rotation)
Turntable
360 degree/rotation

 Loading...
Loading...







