5 Motion Control Parameters
5-22
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
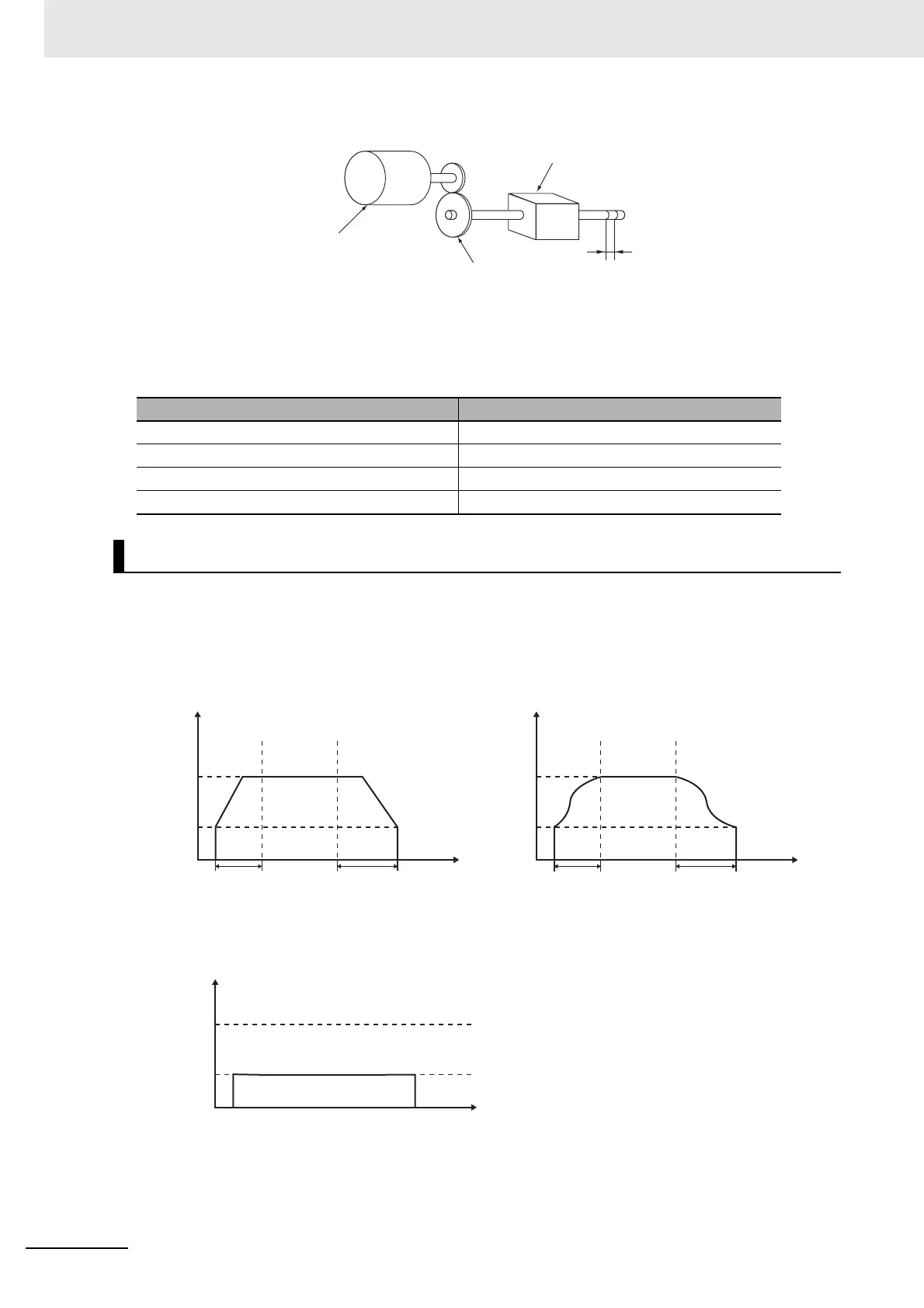
The Maximum Velocity is set to 200 based on a calculation for the conditions (maximum speed:
6,000 r/min, reduction ratio: 1/5, ball screw pitch: 10 mm; 6,000 r/min × 1/5 × 10 mm = 12,000
mm/min = 200 mm/s). The default setting of 400,000,000 would exceed the maximum speed of the
motor, so you must change the setting.
Set the start velocity to 0 when you use a servomotor.
If you use a stepper motor, use 10% to 50% of the maximum self-start frequency to prevent loosing the
sync at startup. However, this depends on the load, so refer to the manual for the stepper motor.
If the target velocity is less than or equal to the start velocity, acceleration/deceleration are not per-
formed and the axis moves at the target velocity.
Parameter name Setting
Unit of Display mm
Command Pulse Count Per Motor Rotation 8,388,608
Work Travel Distance Per Motor Rotation 2
Maximum Velocity 200
Start Velocity
Reduction ratio: 1/5
Servomotor
encoder resolution: 23 bits/rotation
(8,388,608 pulses per rotation)
Workpiece
Ball screw pitch: 10 mm
Target velocity
Start velocity
0
Acceleration
Deceleration
Time
Velocity
Not Specifying Jerk Specifying Jerk
Target velocity
Start velocity
0
Acceleration
Deceleration
Time
Velocity
Start velocity
Target velocity
0
Time
Velocity

 Loading...
Loading...







