5-21
5 Motion Control Parameters
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
5-2 Axis Parameters
5
5-2-4 Operation Settings
*1 The maximum velocity is used as the command velocity if you specify a velocity command value that is greater
than the maximum velocity. This parameter also applies to interpolation control operation.
Do not set any value that exceeds the setting range of Maximum Velocity even if the connected Servomo-
tor/Servo Drive unit, as a single unit, provides a faster rotation speed than the maximum velocity.
*2 The maximum value that you can set is as follows when the value is converted to pulses:
For a CPU Unit with unit version 1.02 or earlier, the value is 400,000,000 [pulses/s].
For a CPU Unit with unit version 1.03 or later, the value is 500,000,000 [pulses/s].
For a CPU Unit with unit version 1.11 or later, the value is 2,147,483,647 [pulses/s].
*3 A CPU Unit with unit version 1.05 or later and Sysmac Studio version 1.06 or higher are required to use this
parameter.
*4 The maximum jog velocity is used as the command velocity if you specify a velocity command value that is
greater than the maximum jog velocity.
*5 For a CPU Unit with unit version 1.10 or later, Blending is not changed to Buffered. Refer to 9-5-7 Multi-execu-
tion of Motion Control Instructions (Buffer Mode) for details.
*6 For a CPU Unit with unit version 1.10 or later, the axis does not stop with an error when Blending is used for
operation. Refer to 9-5-7 Multi-execution of Motion Control Instructions (Buffer Mode) for details.
*7 Refer to 9-5-6 Re-executing Motion Control Instructions and 9-5-7 Multi-execution of Motion Control Instruc-
tions (Buffer Mode) for details on the Operation Selection at Reversing parameter.
*8 This parameter is enabled only for torque control.
*9 The in-position check is processed by the MC Function Module. The function in the Servo Drive is not used.
This section provides a setting example for the maximum velocity.
Setting Example for the Maximum Velocity
The same machine as in When Not Using a Reducer on page 5-15 is described here for a Servomo-
tor with a maximum speed of 6,000 r/min.
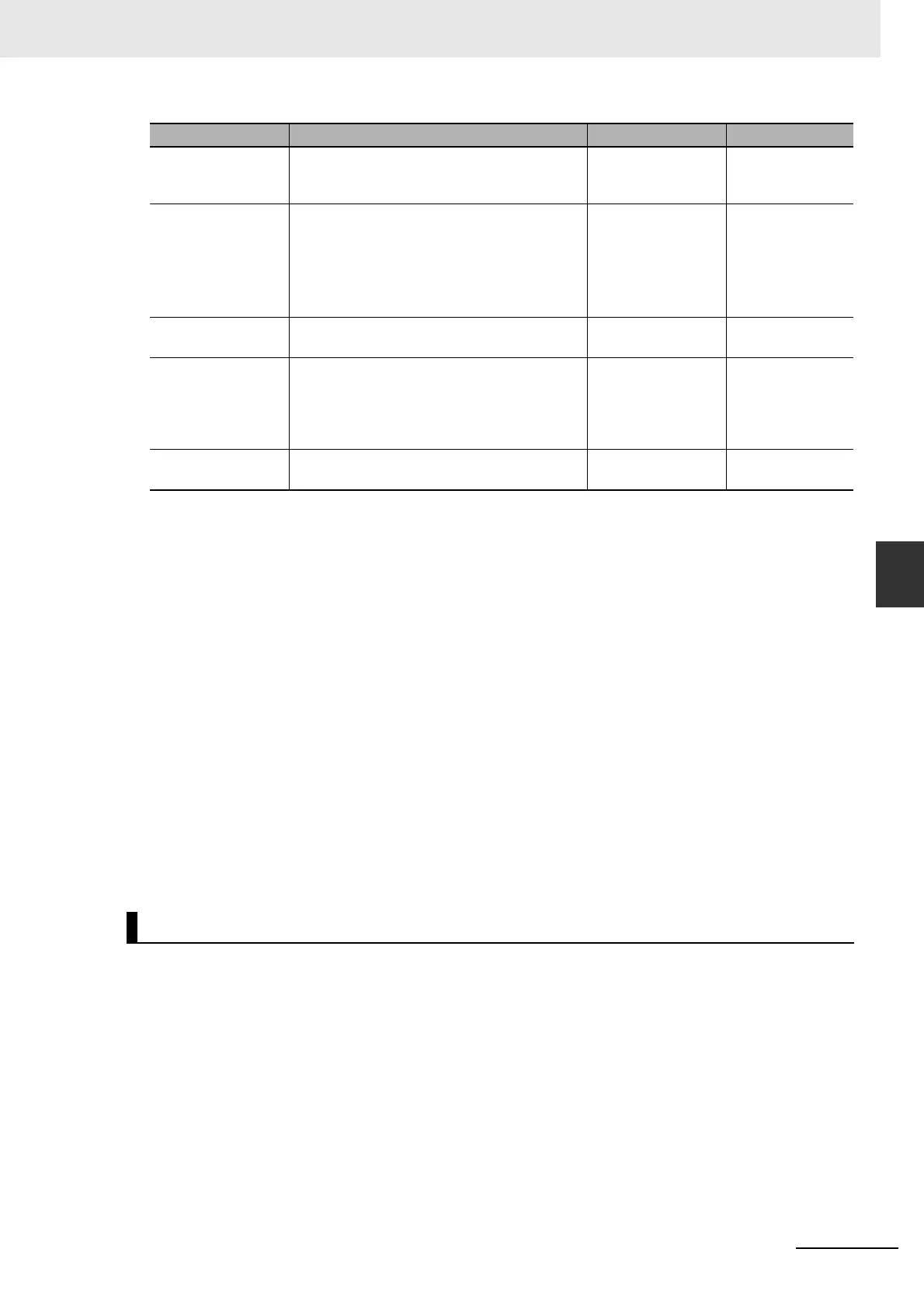
Negative Torque
Warning Value
*8
Set the torque command value at which to
output a negative torque warning. No negative
torque warning is output if 0 is set. (Unit: %)
0 to 1,000 0
Actual Velocity Fil-
ter Time Constant
Set the time period to calculate the average
travel of the actual velocity in milliseconds.
The average travel is not calculated if 0 is set.
(Unit: ms)
Use this to reduce variations in the actual cur-
rent velocity when axis velocity is slow.
0 to 100 0
In-position Range
*9
Set the in-position width. (Unit: command
units)
Non-negative long
reals
10
In-position Check
Time
*9
Set the in-position check time in milliseconds.
Set 0 to check for the end of positioning only
when you define the home position during
homing and not check positioning at other
times. (Unit: ms)
0 to 10,000 0
Zero Position Range Set the home position detection width. (Unit:
command units)
Non-negative long
reals
10
Maximum Velocity
Parameter name Function Setting range Default

 Loading...
Loading...







