6 Motion Control Programming
6-26
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
_MC_AX[0-255], _MC1_AX[0-255], and _MC2_AX[0-255] are the Axis Variables in the system-defined
variables. The data type is _sAXIS_REF, which is a structure variable. This section describes the con-
figuration of the Axis Variables and provides details on the members using _MC_AX[0-255] as an
example. The same information applies to MC1_AX[0-255] and _MC2_AX[0-255].
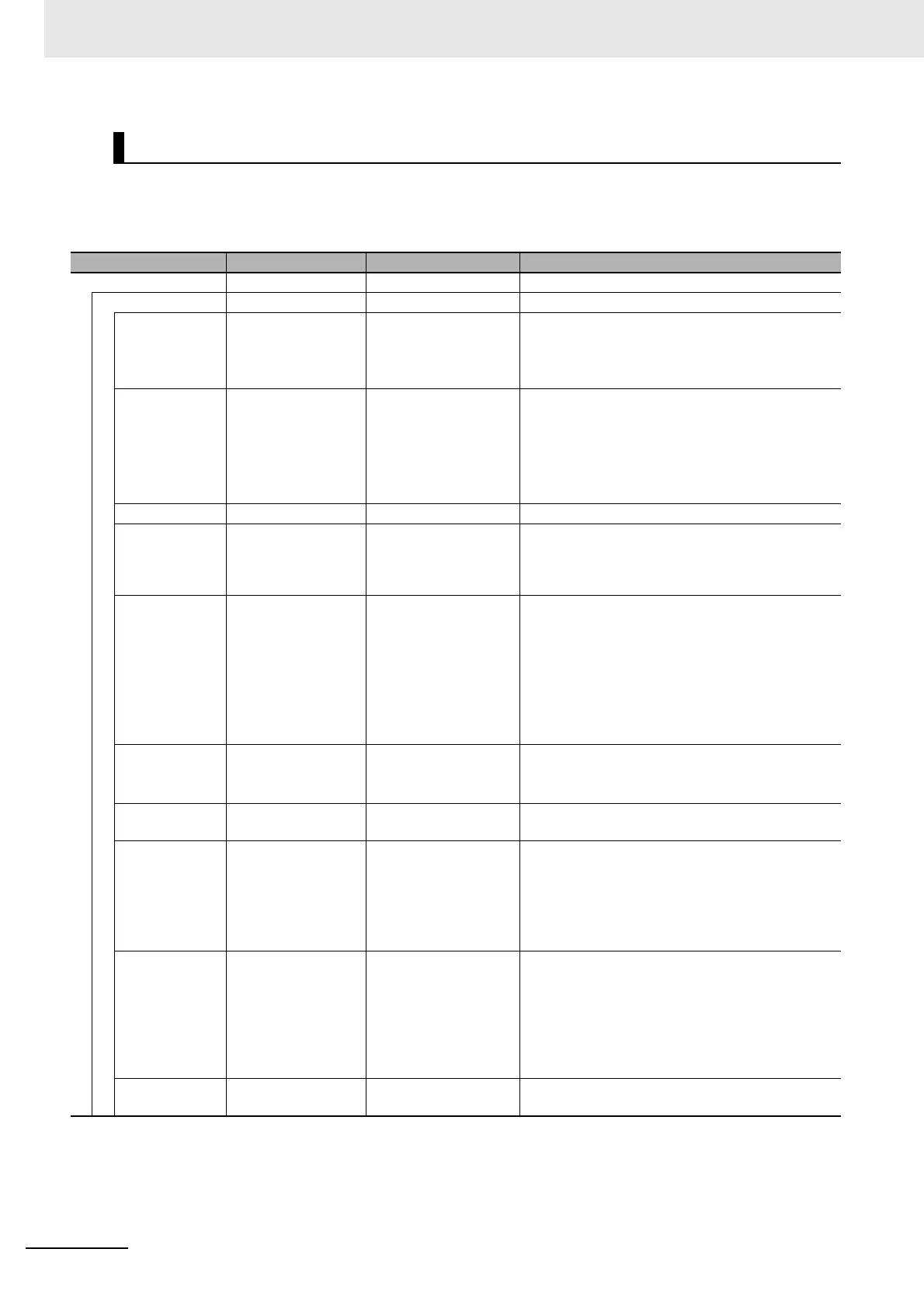
Axis Variables
Variable name Data type Meaning Function
_MC_AX[0-255] _sAXIS_REF Axis Variable
Status _sAXIS_REF_STA Axis Status
Ready BOOL Axis Ready-to-execute TRUE when preparations for axis execution are
finished and the axis is stopped.
This variable indicates the same status as when
_MC_AX[*].Status.Standstill is TRUE (stopped).
Disabled BOOL Axis Disabled TRUE while the Servo is OFF for the axis.
The following axis states are mutually exclusive.
Only one can be TRUE at the same time.
Disabled, Standstill, Discrete, Continuous, Syn-
chronized, Homing, Stopping, ErrorStop, or Coor-
dinated
Standstill BOOL Standstill TRUE while the Servo is ON for the axis.
Discrete BOOL Discrete Motion TRUE while position control is executed toward
the target position. This includes when the velocity
is 0 because the override factor was set to 0
during a discrete motion.
Continuous BOOL Continuous Motion TRUE during continuous motion without a target
position.
This state exists during velocity control or torque
control.
This includes when the velocity is 0 because the
target velocity is set to 0 and when the velocity is
0 due to an override factor set to 0 during continu-
ous motion.
Synchronized BOOL Synchronized Motion TRUE during execution of synchronized control.
This includes waiting for synchronization after
changing to synchronized control instructions.
Homing BOOL Homing TRUE when homing for the MC_Home or
MC_HomeWithParameter instruction.
Stopping BOOL Deceleration Stopping TRUE until the axis stops for a MC_Stop or
MC_TouchProbe instruction.
This includes when Execute is TRUE after the
axis stops for an MC_Stop instruction. Axis motion
instructions are not executed while decelerating to
a stop. (CommandAborted is TRUE.)
ErrorStop BOOL Error Deceleration
Stopping
This status exists when the axis is stopping or
stopped for execution of the MC_ImmdediateStop
instruction or a minor fault (while
_MC_AX[*].MFaultLvl.Active is TRUE (Axis Minor
Fault Occurrence).
Axis motion instructions are not executed in this
state. (CommandAborted is TRUE.)
Coordinated BOOL Coordinated Motion TRUE when an axes group is enabled by a multi-
axes coordinated control instruction.

 Loading...
Loading...







