6-27
6 Motion Control Programming
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
6-6 System-defined Variables for Motion Control
6
6-6-3 Tables of System-defined Variables for Motion Control
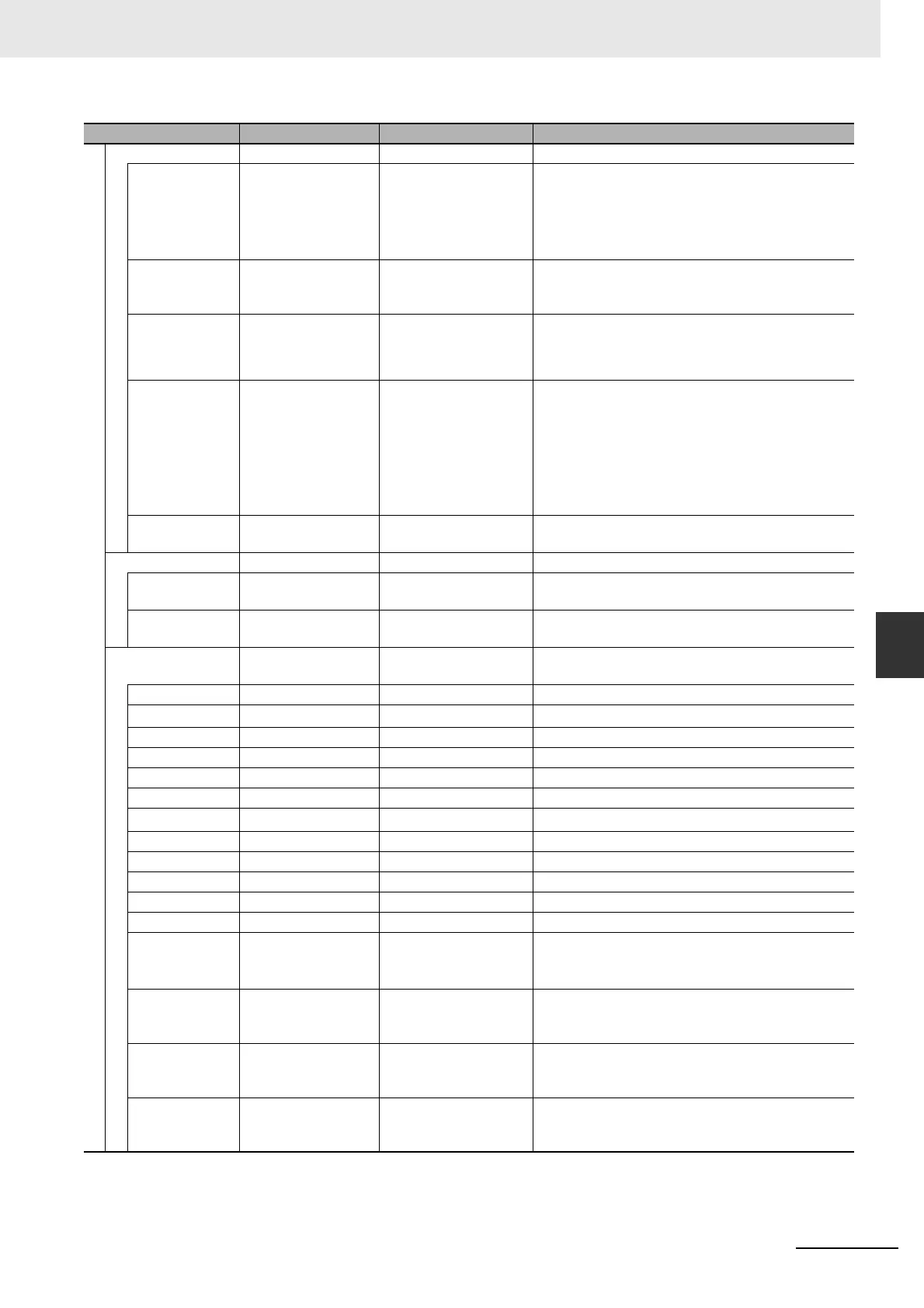
Details _sAXIS_REF_DET Axis Control Status Gives the control status of the command.
Idle BOOL Idle TRUE when processing is not currently performed
for the command value, except when waiting for
in-position state.
*1
Idle and InPosWaiting are mutually exclusive.
They cannot both be TRUE at the same time.
InPosWaiting BOOL In-position Waiting TRUE when waiting for in-position state. The in-
position check performed when positioning for the
in-position check.
Homed BOOL Home Defined
TRUE when home is defined.
*2
FALSE: Home not defined.
TRUE: Home is defined
InHome BOOL In Home Position TRUE when the axis is in the range for home. It
gives an AND of the following conditions.
• Home defined
• The actual current position is in the zero posi-
tion range with home as the center.
TRUE also when the zero position is passed by
while the axis is moving in command status.
VelLimit
*3
BOOL Command Velocity
Saturation
TRUE while the command velocity is limited to the
maximum velocity during synchronized control.
Dir _sAXIS_REF_DIR Command Direction Gives the command travel direction.
Posi BOOL Positive Direction TRUE when there is a command in the positive
direction.
Nega BOOL Negative Direction TRUE when there is a command in the negative
direction.
DrvStatus _sAX-
IS_REF_STA_DRV
Servo Drive Status Gives the status of the Servo Drive.
ServoOn BOOL Servo ON TRUE when the Servomotor is powered.
Ready BOOL Servo Ready
TRUE when the Servo is ready.
*4
MainPower BOOL Main Power TRUE when the Servo Drive main power is ON.
P_OT BOOL Positive Limit Input TRUE when the positive limit input is enabled.
N_OT BOOL Negative Limit Input TRUE when the negative limit input is enabled.
HomeSw BOOL Home Proximity Input TRUE when the home proximity input is enabled.
Home BOOL Home Input
TRUE when the home input is enabled.
*5*6
ImdStop BOOL Immediate Stop Input TRUE when the immediate stop input is enabled.
Latch1 BOOL External Latch Input 1 TRUE when latch input 1 is enabled.
Latch2 BOOL External Latch Input 2 TRUE when latch input 2 is enabled.
DrvAlarm BOOL Drive Error Input TRUE while there is a Servo Drive error.
DrvWarning BOOL Drive Warning Input TRUE while there is a Servo Drive warning.
ILA BOOL Drive Internal Limiting TRUE when the Servo Drive limiting function actu-
ally limits the axis. This corresponds to one of the
following limits in the G5-series Servo Drive.
*7
CSP BOOL Cyclic Synchronous
Position (CSP)
Control Mode
TRUE when the Servo is ON at the Servo Drive
and the current mode is CSP Mode.
*8
CSV BOOL Cyclic Synchronous
Velocity (CSV)
Control Mode
TRUE when the Servo is ON at the Servo Drive
and the current mode is CSV Mode.
*6
CST BOOL Cyclic Synchronous
Torque (CST)
Control Mode
TRUE when the Servo is ON at the Servo Drive
and the current mode is CST Mode.
*6
Variable name Data type Meaning Function

 Loading...
Loading...







