6 Motion Control Programming
6-30
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
*1 This also includes states where processing is performed while in motion at velocity 0, during following error resets, during
synchronized control, and during coordinated motion.
*2 Even if the variable is TRUE, the home must be defined again in the following cases.
When you make a change in the position count settings or the unit conversion settings.
If an error or erroneous operation occurs on the Servo Drive, which leads to loss of absolute position data. Examples of
errors and erroneous operations include breaks of encoder cables and clear of absolute encoder data.
*3 Use VelLimit only for a slave axis that is currently in synchronized control.
*4 This variable is TRUE when the PDS state of the Servo Drive is either Ready to switch on, Switched on or Operation
enabled and the main circuit power supply (voltage enabled) is ON. However, if Main circuit power supply OFF
detection is set to Do not detect, ON/OFF status of the main circuit power supply is ignored. For details on the PDS
states and the Main circuit power supply OFF detection, refer to A-5 PDS State Transition.
*5 The Detailed Settings Area on the Axis Basic Settings Display of the Sysmac Studio gives the signal that is set for
encoder Z-phase detection digital input. You may not be able to map a PDO to this signal for servo drives from other man-
ufacturers. Refer to the manual for the connected servo drive for details.
*6 You cannot map this signal to a PDO for an OMRON G5-series Linear Motor Type Servo Drive with built-in EtherCAT
communications.
*7 This variable gives the status of bit 11 (internal limit enabled) in the Status Word (6041 hex) that is mapped to a PDO. The
conditions for this variable changing to TRUE depend on the specifications of the Servo Drive. Refer to the manual for the
connected servo drive for details. For an OMRON 1S-series Servo Drive or G5-series Servo Drive, this variable gives an
OR of the following four: torque limits, velocity limits, drive prohibit inputs, and software limits.
*8 This variable gives the value of the Modes of Operation Display (6061 hex) that is mapped to a PDO. The conditions CSP,
CSV, and CST changing to TRUE depend on the specifications of the Servo Drive. Refer to the manual for the connected
servo drive for details.
If the Modes of Operation Display (6061 hex) is not mapped to a PDO, the values of these variables depend on the unit
version of the CPU Unit as follows: For a CPU Unit with unit version 1.09 or earlier, they are always FALSE. For a CPU
Unit with unit version 1.10 or later, they are TRUE when the status of the Statusword (6041 hex) that was mapped to a
PDO is Operation Enabled.
*9
If the process data communications between the CPU Unit and an EtherCAT slave or NX Unit that is assigned to an axis changed
to a non-established state, the variables contain different values as follows depending on the unit version of the CPU Unit.
For a CPU Unit with unit version 1.09 or earlier, the actual current position and the command current position axis vari-
ables will contain 0 or the lower limit. The lower limit is contained when the Count Mode is set to Rotary Mode and 0 is not
included in the range of position.
For a CPU Unit with unit version 1.10 or later, the actual current position and the command current position axis variables
will contain the actual current position output that is just before process data communications change to a non-estab-
lished state.
*10 If you display a data trace that compares the command current torque and the actual current torque in any mode other
than Torque Control Mode, the command current torque will change after one task period. This is caused by the timing of
processing the data trace. Refer to information on data tracing in the NJ/NX-series CPU Unit Software User’s Manual
(Cat. No. W501) for information on the timing of processing data tracing.
*11 A CPU Unit with unit version 1.06 or later and Sysmac Studio version 1.07 or higher are required to use this variable.
*12 For an NX-series Position Interface Unit, this is the node address of the EtherCAT Coupler Unit under which the Position
Interface Unit is mounted.
*13 A CPU Unit with unit version 1.10 or later and Sysmac Studio version 1.12 or higher are required to use this variable.
*14 The parameter is disabled if you set to use a reducer in the unit conversion settings, which is the function added for CPU
Units with unit version 1.11 or later. To confirm alternatively enabled parameters, i.e. Work Travel Distance Per Rotation,
Work Gear Ratio, and Motor Gear Ratio, use the MC_ReadAxisParameter (Read Axis Parameters) instruction.
*15 If the Count Mode is set to Linear Mode, the position just before an overflow is given. In Rotary Mode, the modulo maxi-
mum position is given.
*16 If the Count Mode is set to Linear Mode, the position just before an underflow is given. In Rotary Mode, the modulo mini-
mum position is given.
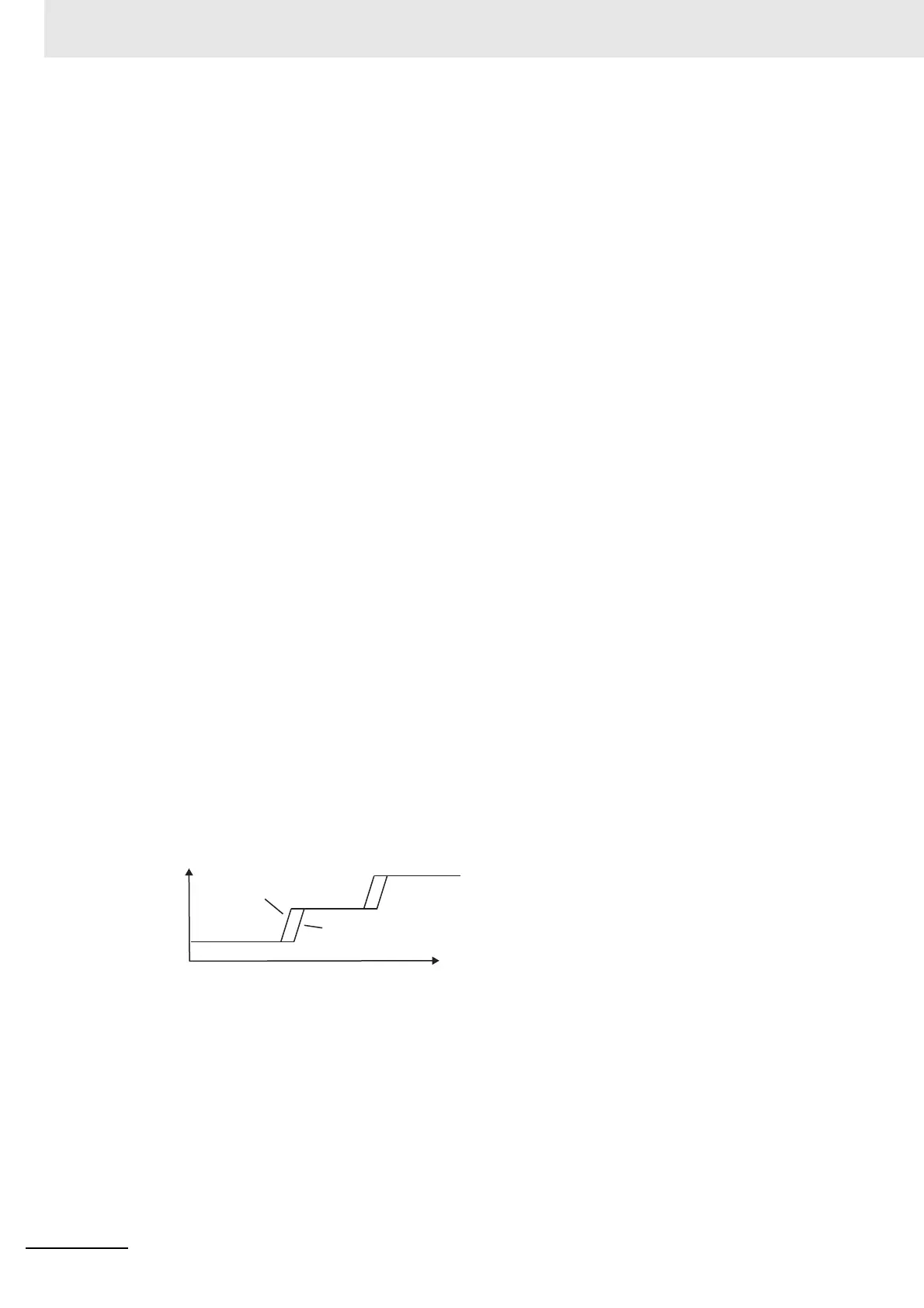
Actual current torque
Data Trace Display Example
Command current torque
Time
Torque
Changes in the display of the command current torque
are delayed in respect to the actual current torque.

 Loading...
Loading...







