6-29
6 Motion Control Programming
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
6-6 System-defined Variables for Motion Control
6
6-6-3 Tables of System-defined Variables for Motion Control
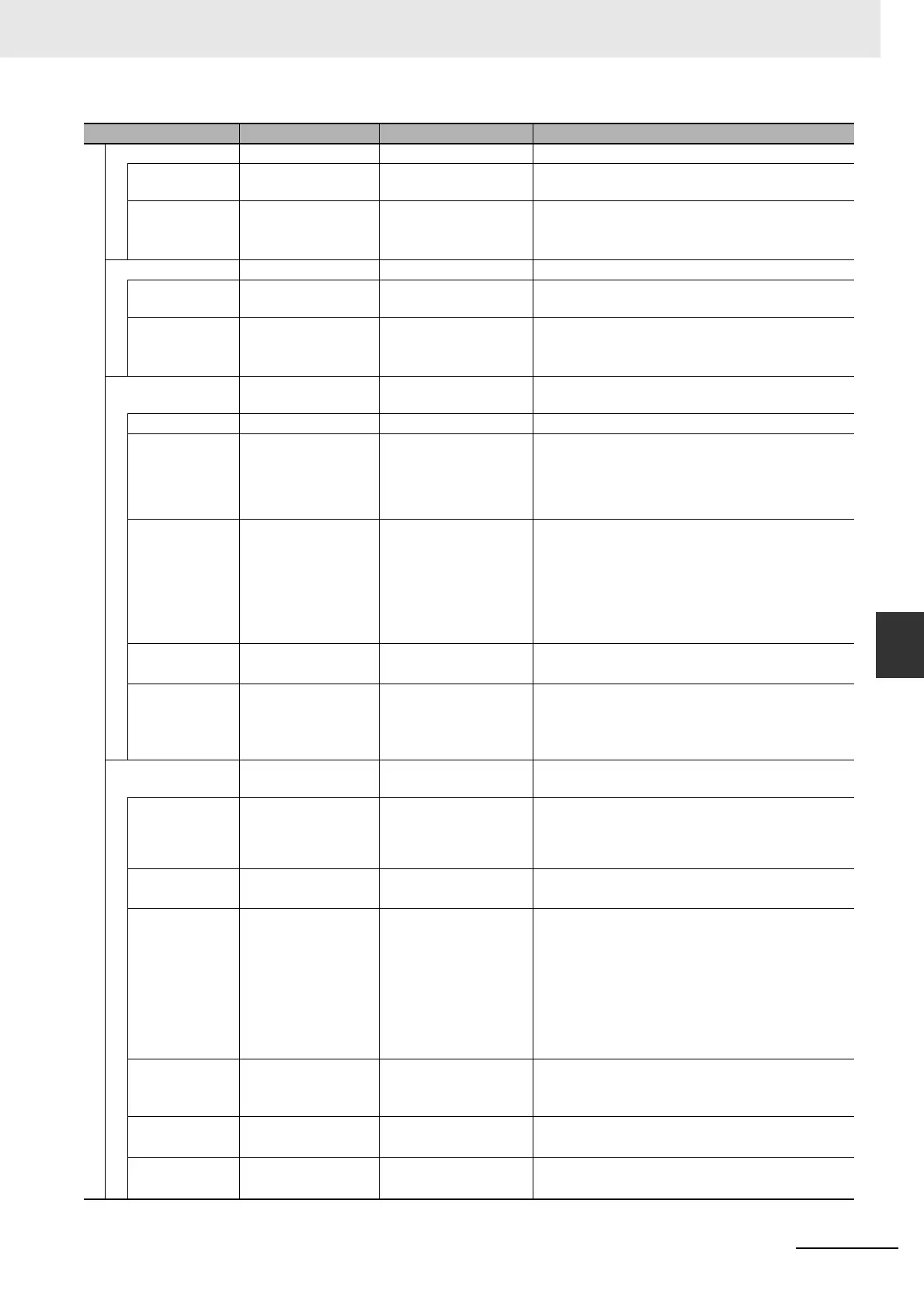
MFaultLvl _sMC_REF_EVENT Axis Minor Fault
Active BOOL Axis Minor Fault
Occurrence
TRUE while there is an axis minor fault.
Code WORD Axis Minor Fault Code Contains the code for an axis minor fault.
The upper four digits of the event code have the
same value.
Obsr _sMC_REF_EVENT Axis Observation
Active BOOL Axis Observation
Occurrence
TRUE while there is an axis observation.
Code WORD Axis Observation
Code
Contains the code for an axis observation.
The upper four digits of the event code have the
same value.
Cfg _sAXIS_REF_CFG Axis Basic Settings Gives the settings of the Axis Basic Settings
parameters.
AxNo UINT Axis Number Contains the logical number of the axis.
AxEnable _eMC_AXIS_USE Axis Use Shows if the axis is enabled or disabled.
0: _mcNoneAxis (Undefined Axis)
1: _mcUnusedAxis (Unused Axis)
2: _mcUsedAxis (Used Axis)
AxType _eMC_AXIS_TYPE Axis Type Contains the axis type. I/O wiring is not required
for virtual axes.
0: _mcServo (Servo Axis)
1: _mcEncdr (Encoder Axis)
2: _mcVirServo (Virtual Servo Axis)
3: _mcVirEncdr (Virtual Encoder Axis)
NodeAddress UINT Node Address Contains the EtherCAT slave address. A value of
16#FFFF indicates that there is no address.
*12
ExecID
*13
UNIT Execution ID Contains the task execution ID.
0: Not assigned to task (undefined axis)
1: Assigned to primary periodic task
2: Assigned to priority-5 periodic task
Scale _sAXIS_REF_S-
CALE
Unit Conversion Set-
tings
Gives settings of the electronic gear ratio.
Num UDINT Command Pulse
Count Per Motor Rota-
tion
Contains the number of pulses per motor rotation
for command positions. The command value is
converted to the equivalent number of pulses
based on the electronic gear ratio.
Den LREAL Work Travel Distance
Per Motor Rotation
Contains the workpiece travel distance per motor
rotation for command positions.
*14
Units _eMC_UNITS Unit of Display Contains the display unit for command positions.
0: _mcPls (pulse)
1: _mcMm (mm)
2: _mcUm (μm)
3: _mcNm (nm)
4: _mcDeg (degree)
5: _mcInch (inch)
CountMode
*13
_eMC_COUNT_MO
DE
Count Mode Contains the count mode.
0: _mcCountModeLinear (linear mode)
1: _mcCountModeRotary (rotary mode)
MaxPos
*13
LREAL Maximum Current
Position
Contains the maximum value of the current
position indication.
*15
MinPos
*13
LREAL Minimum Curernt
Position
Contains the minimum value of the current
position indication.
*16
Variable name Data type Meaning Function
 Loading...
Loading...








