8-9
8 Homing
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
8-2 Homing Procedure
8
8-2-1 Setting Homing Parameters
• An error occurs and the axis stops if the axis is set to reverse direction, and the limit signal in the
home input detection direction turns ON when traveling at the homing approach velocity. However, if
the Homing Operation Mode is 13 (no home proximity input/holding home input), which does not use
proximity signals, no error will occur and the axis will not stop.
• An error occurs and the axis stops if the axis is set to reverse direction for the limit input operation in
both directions and home cannot be detected after moving from the limit input opposite to the home
input detection direction to the other limit input.
Set the homing velocity in command units/s.
Set the velocity after the home proximity input turns ON in command units per second (command
units/s).
Set the homing acceleration rate in command units per seconds squared (command units/s
2
). If the
homing acceleration is set to 0, the homing velocity or other target velocity is used without any acceler-
ation.
Set the homing deceleration rate in command units per seconds squared (command units/s
2
). If the
homing deceleration is set to 0, the homing approach velocity or other target velocity is used without
any deceleration.
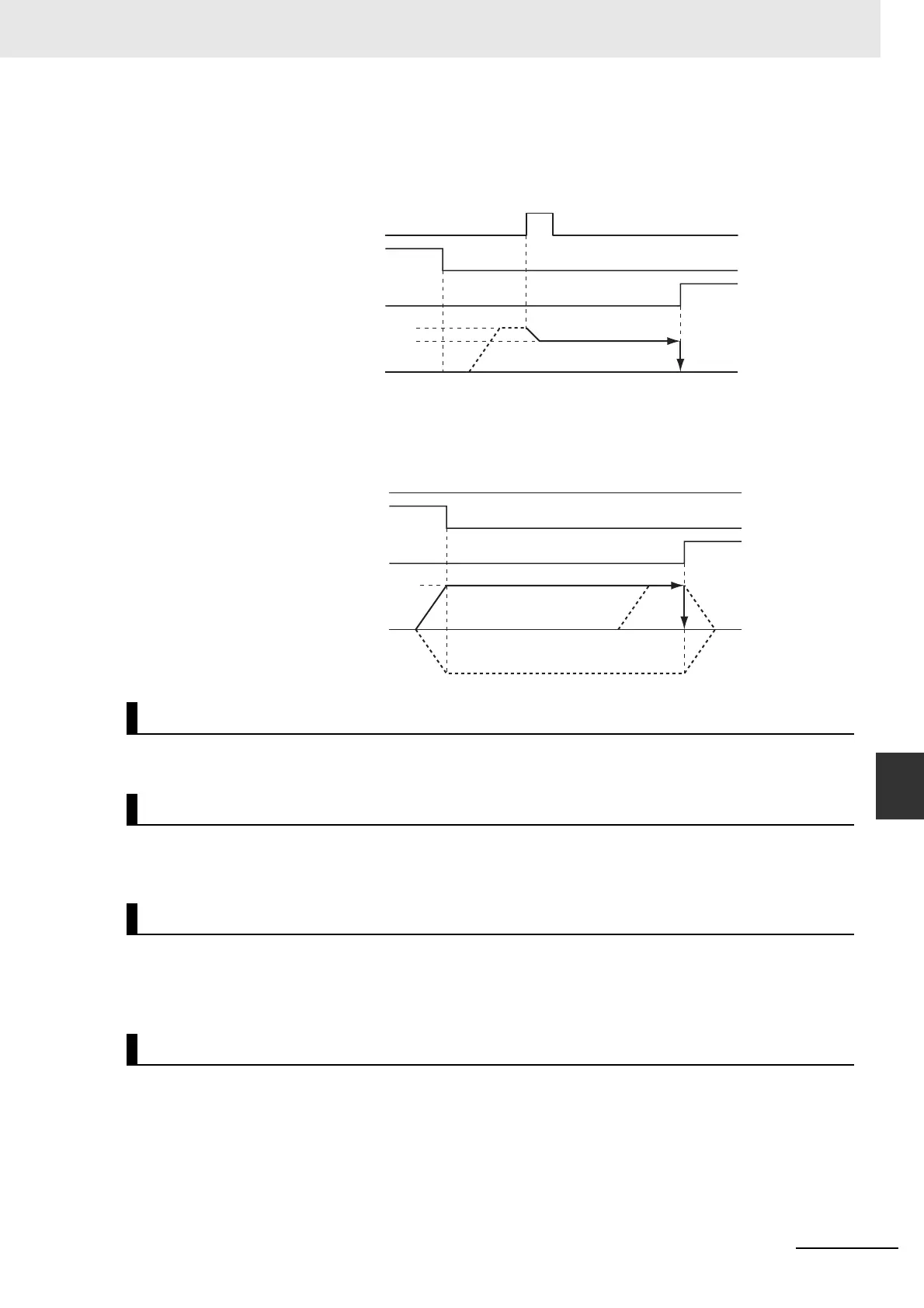
Homing Velocity
Homing Approach Velocity
Homing Acceleration
Homing Deceleration
ON
OFF
ON
OFF
ON
OFF
Home proximity input signal
Limit in direction opposite
to detection direction
Limit in detection direction
Home instruction
Start Stops
Homing approach velocity
Homing velocity
ON
OFF
ON
OFF
ON
OFF
Home proximity input signal
Limit in direction opposite
to detection direction
Limit in detection direction
Home instruction
Start
Stops
Homing approach velocity
Homing velocity

 Loading...
Loading...







