8 Homing
8-10
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
Set the homing jerk in command units per seconds cubed (command units/s
3
). If the homing jerk is set
to 0, acceleration and deceleration are performed without jerk.
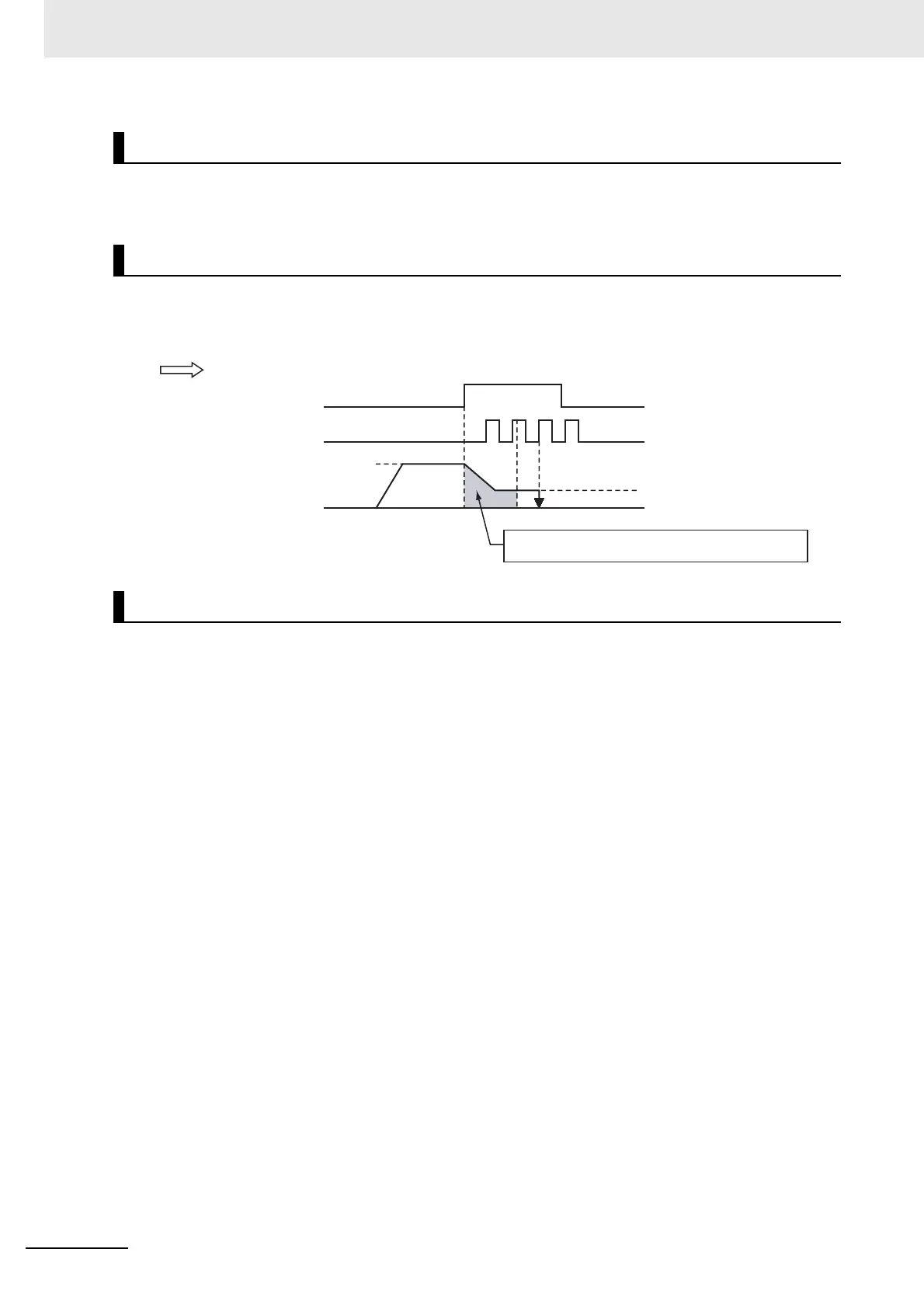
Set the home input mask distance in command units when you set Homing Operation Mode 9 (proxim-
ity reverse turn/home input mask distance). This is the distance from when the home proximity input
signal (i.e., from when deceleration starts) until home is defined.
After home is defined, the operation for the homing compensation value is completed if a homing com-
pensation value is set, and then the actual value is preset to the set value.
This means that you can set home to any specified value rather than to 0. For systems with absolute
encoders, also the absolute encoder home offset value is calculated and saved to the battery-backup
memory in the CPU Unit.
Homing Jerk
Home Input Mask Distance
Home Offset
ON
OFF
ON
OFF
After the proximity input, movement is according to
the home input mask distance.
Positive direction
Stops.
Homing approach velocity
Start
Negative
direction
Homing velocity
Command
output
Home input signal
Home proximity
input signal
Home input detection direction

 Loading...
Loading...







