9-43
9 Motion Control Functions
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
9-5 Common Functions for Single-axis Control
9
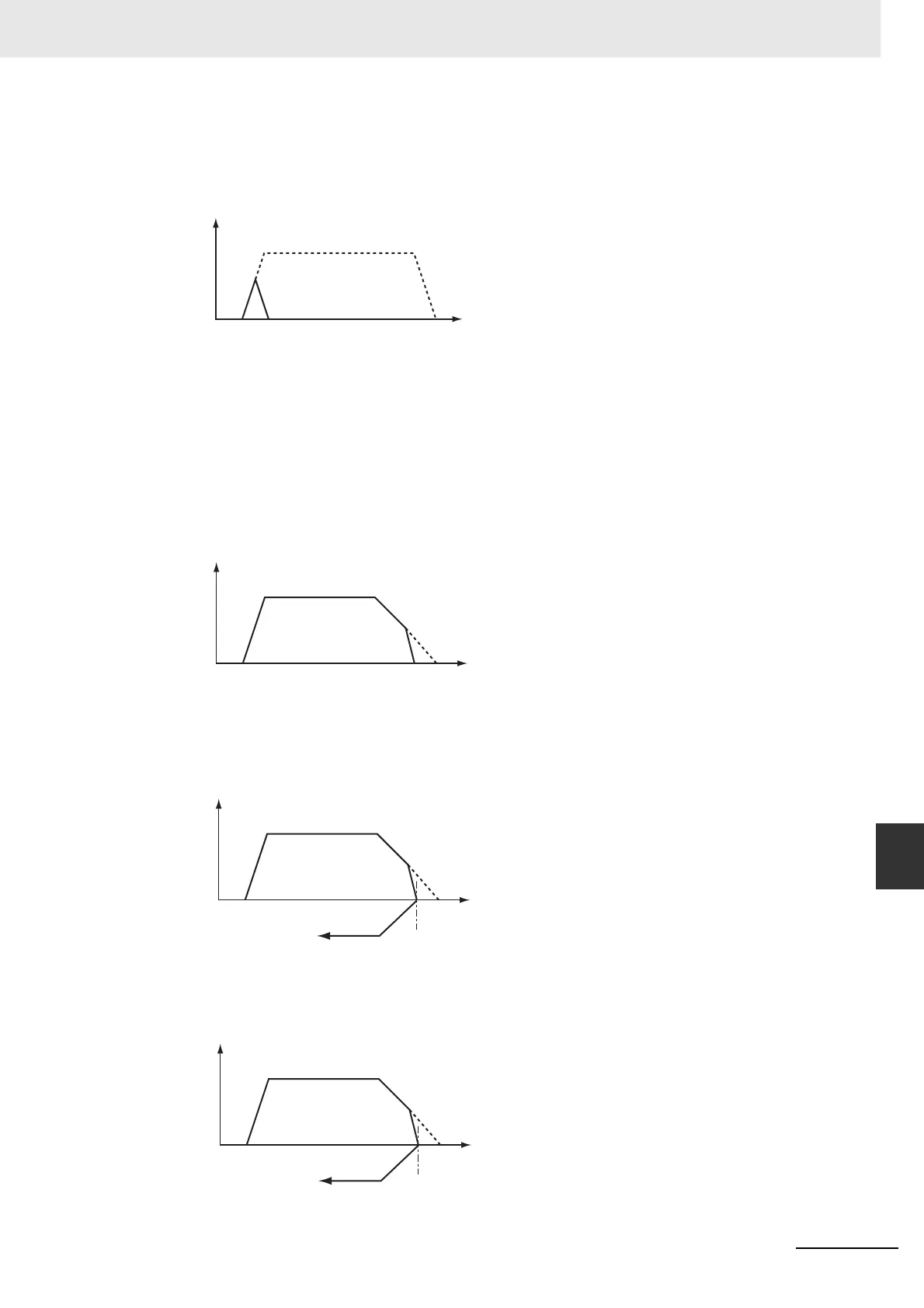
9-5-6 Re-executing Motion Control Instructions
Triangular Control Patterns
The triangular control shown in the figure below may result if the travel distance is shortened due to
a change in the target position.
Excessive Deceleration Patterns
In the following case, priority is given to stopping at the target position. Therefore, the deceleration
rate will exceed the specified deceleration rate. If the deceleration rate exceeds the rate that is set in
the Maximum Deceleration axis parameter, the operation set in the Acceleration/Deceleration Over
axis parameter setting is performed.
If There Is No Reverse Turn and the Target Position Would Be Exceeded at the
Specified Deceleration Rate
If There Is A Reverse Turn and Decelerating to a Stop Would Exceed a
Software Limit
If There Is A Reverse Turn and Decelerating to a Stop Would Result in
Command Current Position Overflow or Underflow
↑Initial command
position
↑New command
position
Executed.↑
↓Command re-executed.
Velocity
No Reverse Turn
↑New command position
↑Initial command position
↓Command re-executed.
↑Executed.
Velocity
No Reverse Turn
Reverse
operation
↑Software limit
↓Command re-executed.
↑Executed.
Velocity
No Reverse Turn
Reverse
operation
↑Counter upper limit
↓Command re-executed.
↑Executed.
Velocity
No Reverse Turn

 Loading...
Loading...







