9 Motion Control Functions
9-44
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
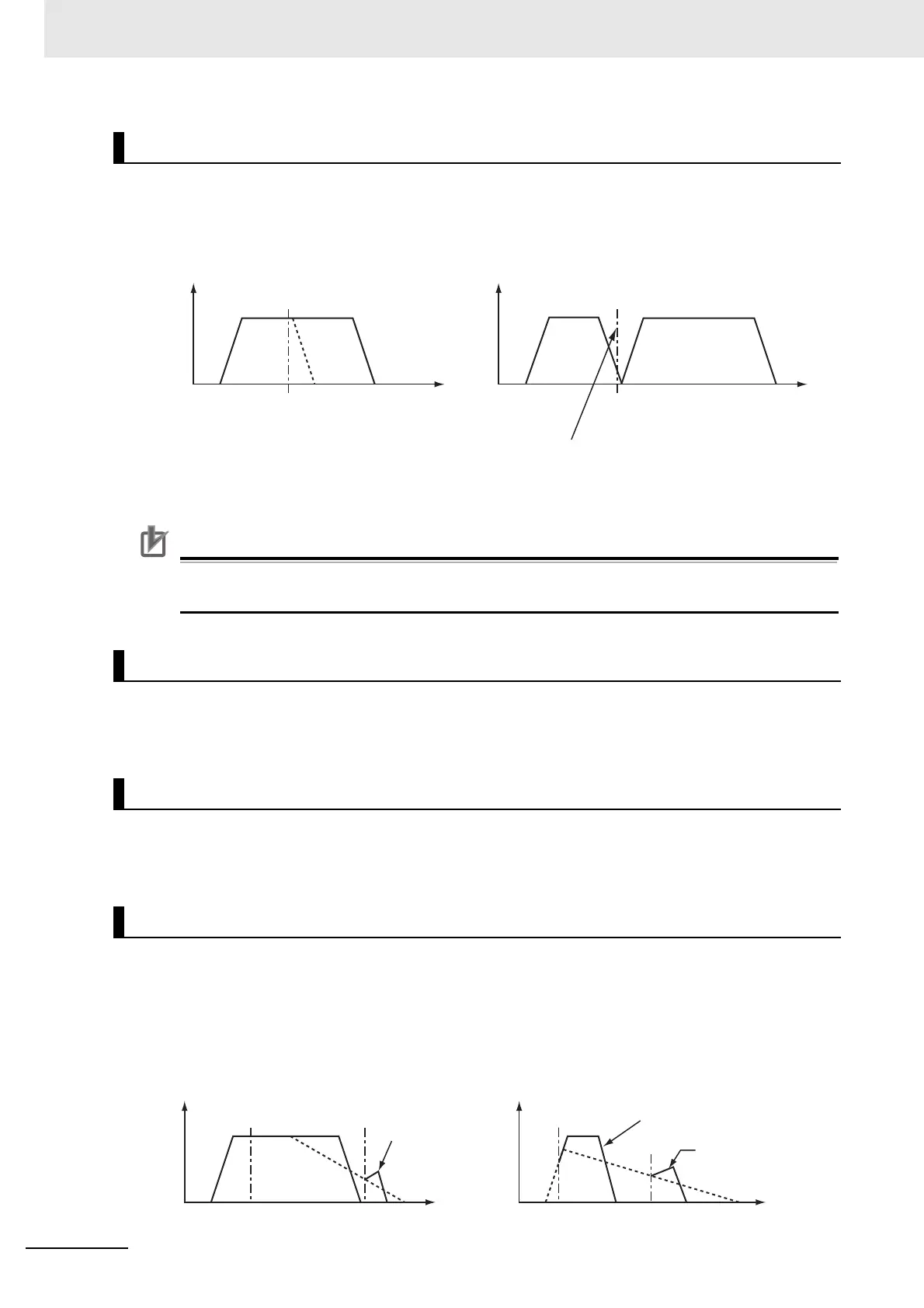
Even if you change the travel distance and re-execute the MC_MoveRelative (Relative Positioning)
instruction, positioning is performed for the new travel distance in reference to the position where the
motion first started. However, if the instruction is executed again just before positioning is completed, it
may be executed as a new instruction rather than as a re-execution of the same instruction.
Precautions for Correct UsePrecautions for Correct Use
Do not change the travel distance and re-execute the instruction just before the end of position-
ing.
The operation is changed only during acceleration (including acceleration for triangular control) and
constant-velocity motion. Changes are also accepted when the axis is decelerating, but operation is not
affected.
The operation is changed only during acceleration and acceleration during triangular control. If it is
changed when moving at a constant speed, the changed rate applies to acceleration for an override.
Changes are also accepted when the axis is decelerating, but operation is not affected.
The deceleration rate is changed only during acceleration, constant-velocity motion, deceleration, trian-
gular control, or during deceleration-exceed control. If the new deceleration rate causes the axis to
exceed the target position, stopping at the target position is given the highest priority. Therefore, in this
case, the actual deceleration rate will exceed the specified deceleration rate.
Patterns Where Deceleration Rate Increases
Changing the Travel Distance
Changing the Target Velocity
Changing the Acceleration Rate
Changing the Deceleration Rate
↓
Command re-executed.
↑
Executed.
Velocity
Re-execution Instruction during Motion Re-execution Just Before End of Positioning
Velocity
↑
Travel distance
specified when
instruction was
re-executed
↑
Initial
travel
distance
↑
Initial
travel
distance
↑
Executed.
Travel distance
specified when
instruction was
re-executed
↓
Command re-executed.
If the instruction is re-executed just before the end of positioning,
positioning for the travel distance that is specified when the instruction
is re-executed is sometimes based on the position to which the axis
was moved for the initial travel distance.
↑
Trapezoidal Control
↑Executed.
↑Command position
There is an area of
acceleration due to the
increased deceleration
rate during deceleration
Increased deceleration rate allows
operation to reach target velocity
for trapezoidal control.
Instruction
↓re-executed
Velocity
↑Command position
There is an area of
acceleration due to
the increased
deceleration rate
during deceleration
↑Executed.
Velocity
Triangular Control Followed by Trapezoidal Control
Instruction
↓re-executed

 Loading...
Loading...







