9 Motion Control Functions
9-68
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
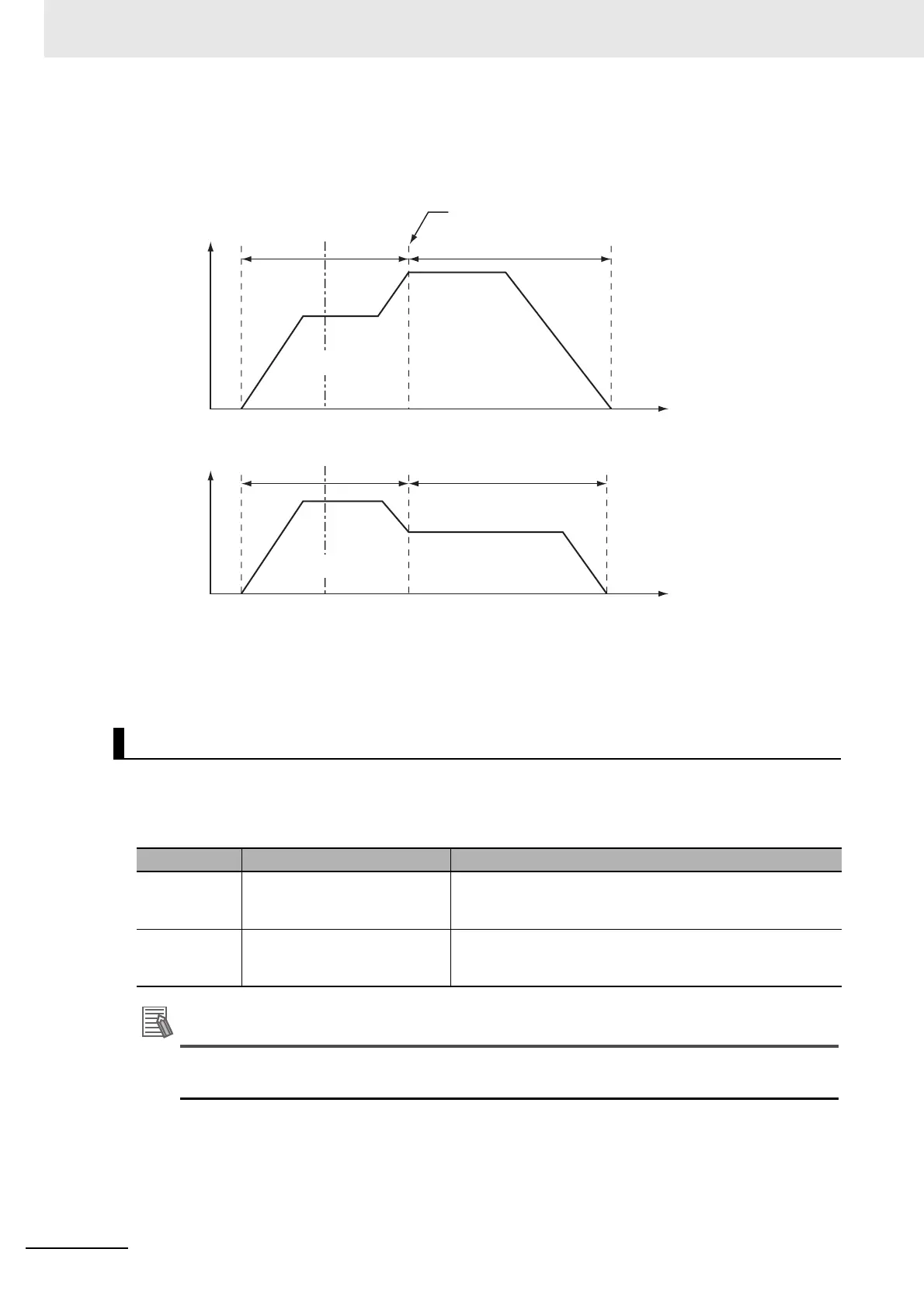
Blending Next (Next Velocity)
Operation is performed using the target position of the current instruction and the target velocity of
the buffered instruction.
Blending High (High Velocity)
Operation is performed using the target position of the current instruction and the target velocity that
is the faster of the target velocities for the current instruction and buffered instruction.
Multi-execution of instructions for axes groups may create some shock on the device and/or workpiece
due to changes in the direction of the interpolation path. You can specify the TransitionMode input vari-
able to the motion control instruction to select a transition method to use between instructions in order
to lessen this shock. You can choose from the following transition modes in the MC Function Module.
The PLCopen
®
technology specifications define numbers 0 through 9. Number 10 is unique to
the MC Function Module.
Transition Modes
No. Transition mode Description
0 Transition Disabled (_mcTM-
None)
Do not perform any processing for transitions (default). No
attempt is made to lessen the shock, but this results in a
shorter operation time.
10 Superimpose Corners (_mcT-
MCornerSuperimposed)
The deceleration of the current instruction is superimposed
on the acceleration of the buffered instruction. You can keep
the linear velocity of the interpolation path constant.
Time
Buffered instruction
Time
Buffered instruction
The transit velocity is the command
velocity of the buffered command
Current instruction
Multi-execution of instruction
Current instruction
Multi-execution of instruction
Velocity
Cases Resulting in Deceleration
Velocity
Cases Resulting in Acceleration

 Loading...
Loading...







