10 Sample Programming
10-58
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
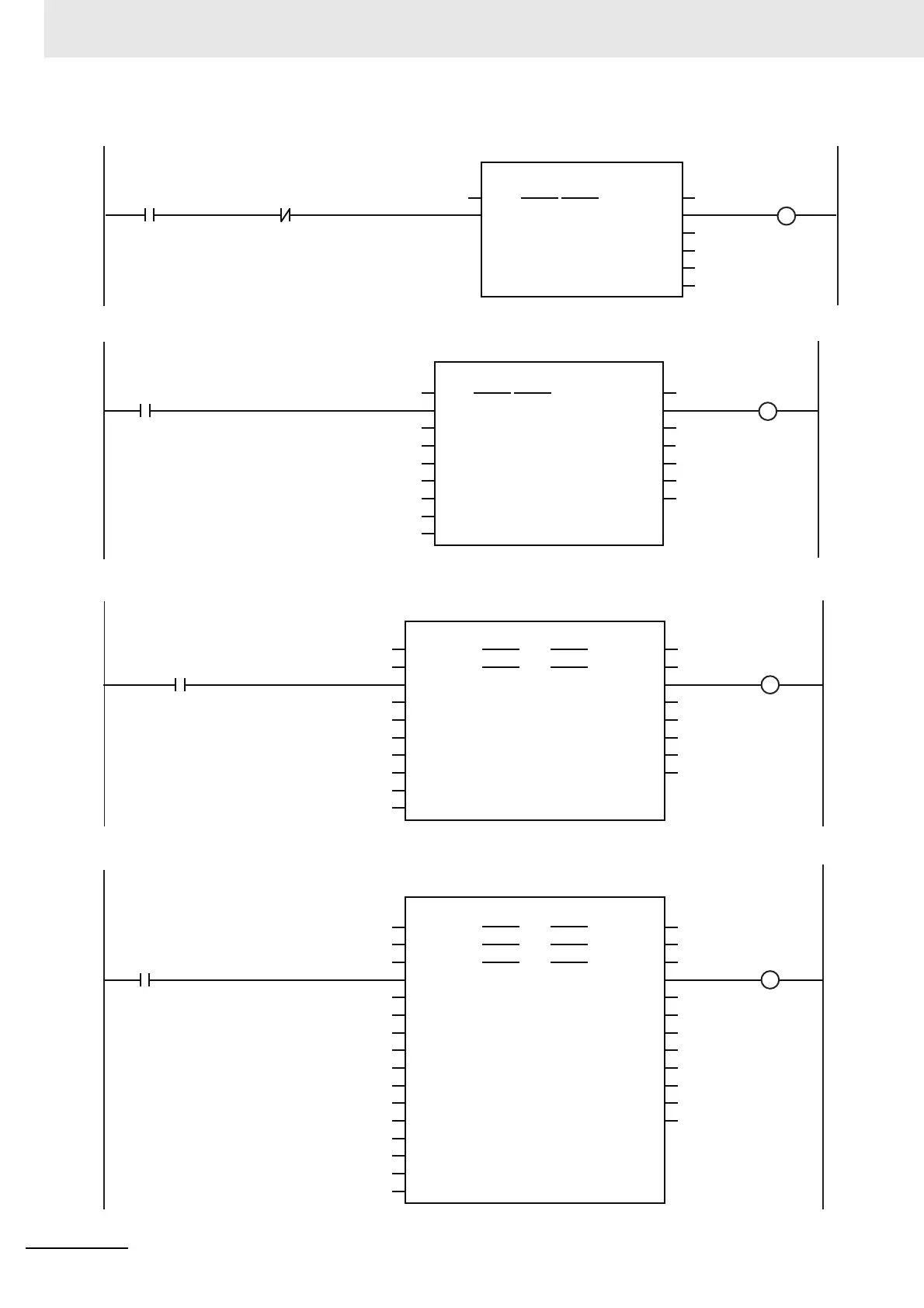
VEL
Vel_Act
Vel_Ca
Vel_Err
Vel_ErrID
Vel_InVel
InVelocity
Error
CommandAborted
Axis
Active
ErrorID
Execute
MC_MoveVelocity
Axis
MC_Axis000
Hm1_D
Vel_BsyBusyVelocity
LREAL#100.0
Deceleration
LREAL#0.0
Direction
_eMC_DIRECTION#_mcPositiveDirection
Acceleration
LREAL#0.0
Jerk
Continuous
BufferMode
Hm4_Bsy
Hm4_Ca
Hm4_Err
Hm4_ErrID
Hm4_D
Done
Error
CommandAborted
Axis
Busy
ErrorID
Execute
HM4
MC_Home
Axis
MC_Axis003
Pwr4_Status MC_Axis003.Details.Homed
GearIn_InGear
GEARIN
Slave
Error
MC_GearIn
Master
ErrorID
MC_Axis000
CommandAborted
Active
Busy
InGear
Slave
Master
RatioNumerator
RatioDenominator
ReferenceType
Acceleration
Deceleration
Jerk
BufferMode
MC_Axis001
_eMC_REFERENCE_TYPE#_mcCommand
LREAL#0.0
LREAL#0.0
UINT#1
UINT#1
Vel_InVel
GearIn_Ca
GearIn_Err
GearIn_ErrID
GearIn_Bsy
GearIn_Act
Execute
CamIn_InCam
Error
ErrorID
CommandAborted
CAMIN
Slave
Busy
MC_CamIn
Master
Direction
Active
MC_Axis000
ReferenceType
Index
EndOfProfile
InSync
InCam
CamTable
Slave
Master
CamTable
Periodic
StartMode
StartPosition
MasterStartDistance
MasterScaling
SlaveScaling
MasterOffset
SlaveOffset
MC_Axis002
CamProfile0
LREAL#20.0
LREAL#40.0
LREAL#1.0
LREAL#1.0
LREAL#0.0
BOOL#TRUE
_eMC_START_MODE#_mcRelativePosition
_eMC_DIRECTION#_mcNoDirection
_eMC_REFERENCE_TYPE#_mcCommand
BufferMode
LREAL#0.0
CamTransition
Vel_InVel
CamIn_Index
CamIn_Bsy
CamIn_Act
CamIn_Ca
CamIn_ErrID
CamIn_InSync
CamIn_Eop
CamIn_Err
Execute
If the Servo is ON for axis 3 and home is not defined, the MC_Home instruction is executed.
If homing is completed for axis 0, velocity control is executed.
If homing is completed for axis 0, gear operation is executed.
When axis 0 reaches the target velocity, cam operation is executed.

 Loading...
Loading...







