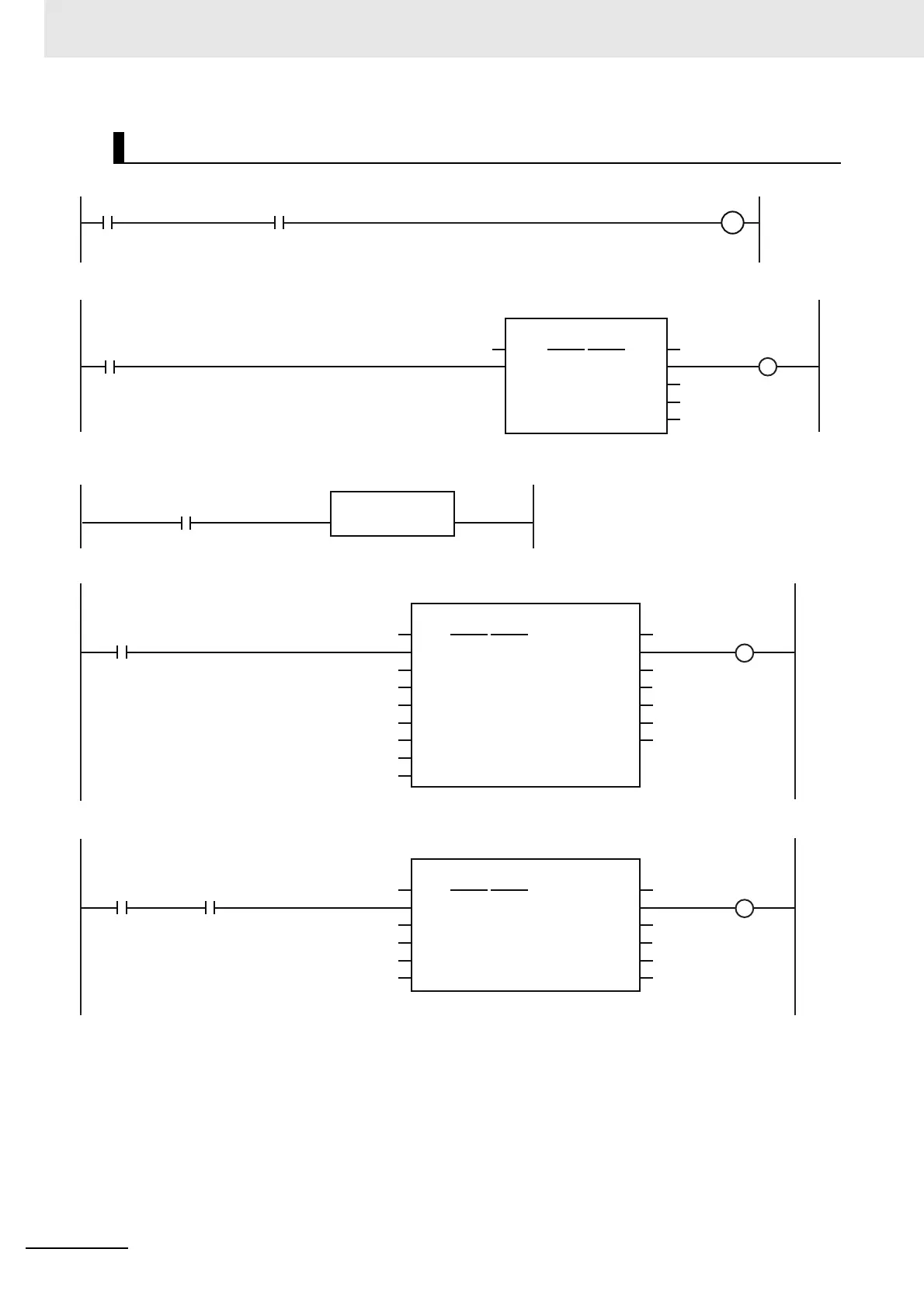
MC_Axis000.MFaultLvl.Active
EN
FaultHandler
FaultHandler
Pwr_StatusLock0
Enable Status
ErrorID
PWR
Error
MC_Power
Axis Axis
Busy
MC_Axis000
Pwr_Bsy
Pwr_Err
Pwr_ErrID
VEL
Vel_Act
Vel_Ca
Vel_Err
Vel_ErrID
Vel_InVel
InVelocity
Error
CommandAborted
Axis
Active
ErrorID
Execute
MC_MoveVelocity
Axis
MC_Axis000
Pwr_Status
Vel_BsyBusyVelocity
LREAL#36.0
Deceleration
LREAL#1000.0
Direction
Acceleration
LREAL#1000.0
Jerk
LREAL#100.0
Continuous
BufferMode
SET_POS
Set_Pos_Ca
Set_Pos_Err
Set_Pos_ErrID
Set_PosD
Done
ErrorID
Error
Axis
CommandAborted
Execute
MC_SetPosition
Axis
MC_Axis000
Pwr_Status
Set_Pos_BsyBusyPosition
LREAL#0.0
Relative
ReferenceType
ExecutionMode
StartSetPos
StartPg
Lock0
MC_Axis000.DrvStatus.Ready
If the Servo is ON for axis 0, velocity control is executed.
If StartSetPos is TRUE while the Servo is ON, the Set Position instruction is executed.
If the Servo Drive for axis 0 is ready, turn ON the Servo for axis 0.
If a minor fault level error occurs for axis 0, the error handler for the device (FaultHandler) is executed.
Program the FaultHandler according to the device.
Check if the Servo Drive for axis 0 is ready when StartPg is TRUE.

 Loading...
Loading...







