2 Motion Control Configuration and Principles
2-14
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
If second high-speed motion control after the primary periodic task is required, place the motion control
instructions (FB) in a priority-5 periodic task.
The basic operation is the same as that of the primary periodic task.
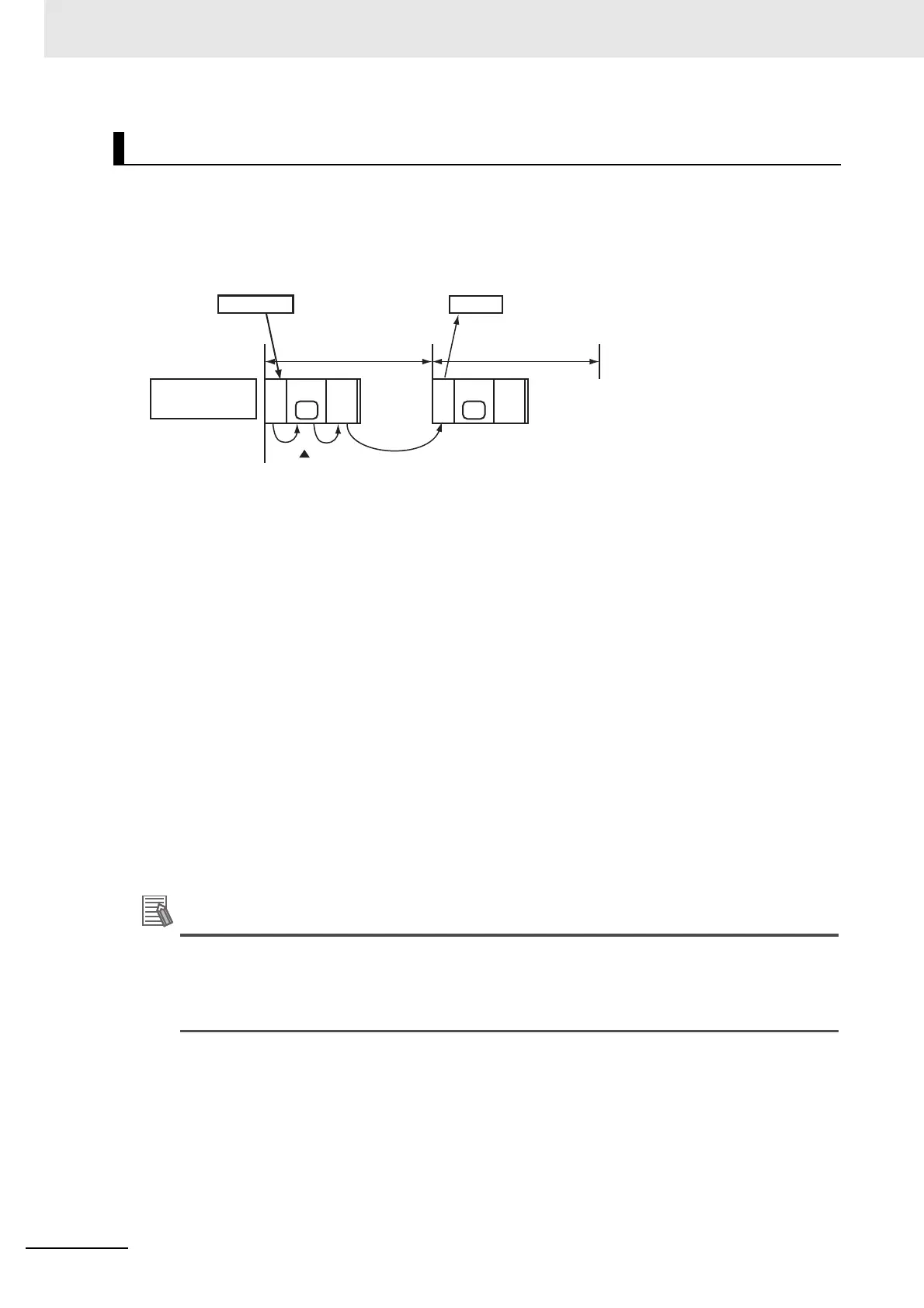
Timing of Processing
1
Loading Data
The input data from the EtherCAT slaves (slave A) is loaded during the I/O refresh (IO).
2
Instruction Execution
The motion control instructions (FB) are executed based on the data that was loaded during
user program execution (UPG).
The output variables of the motion control instructions are refreshed at this point.
3
Command Generation
Motion processing according to the motion control instructions (FB) that were executed is per-
formed during motion control (MC) immediately after user program execution in the primary
periodic task. During this processing, execution commands for the Servo Drives and other
devices are generated.
4
Sending Commands
The execution commands that were generated are sent to the Servo Drive or other device
during the I/O refresh (IO) in the next period.
• You can use the priority-5 periodic task only with NX701 CPU Units.
• The priority-5 periodic task is used when you want to divide functions configuring the deivce
for separate control, those functions that need high-speed control with the primary periodic
task and others with the priority-5 periodic task.
Using Motion Control Instructions in a Priority-5 Periodic Task
IN
UPG
FB
IO MC UPG
FB
IO MC
Execution of motion control instructions
Servo
Execution command
Slave A
Task period Task period
Priority-5
periodic task

 Loading...
Loading...







