2-15
2 Motion Control Configuration and Principles
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
2-3 Motion Control Principles
2
2-3-2 Example of Task Operations for Motion Control
Axis Variable Update Timing in Multi-motion
The multi-motion refers to execution of parallel control using the primary periodic task and the
priority-5 periodic task.
In the multi-motion, the user program for the priority-5 periodic task can access the values of an Axis
Variable of an axis that is controlled in the primary periodic task. The reverse is possible: the user
program for the primary periodic task can access the values of an Axis Variable of an axis that is
controlled in the priority-5 periodic task.
• Refer to 3-1-4 Synchronizing Axis Variables for details on synchronization of axis variables.
• The user program for the priority-16 periodic task can access the values of an Axis Variable
of an axis that is controlled in the primary periodic task. Refer to Using Motion Control
Instructions in a Priority-16 Periodic Task on page 2-17 and 3-1-4 Synchronizing Axis Vari-
ables for details.
The values of an Axis Variable are updated synchronizing to the task period of accessing task.
The values of an Axis Variable that is accessed are not written during the user program execution
for the task that accesses the values of an Axis Variable.
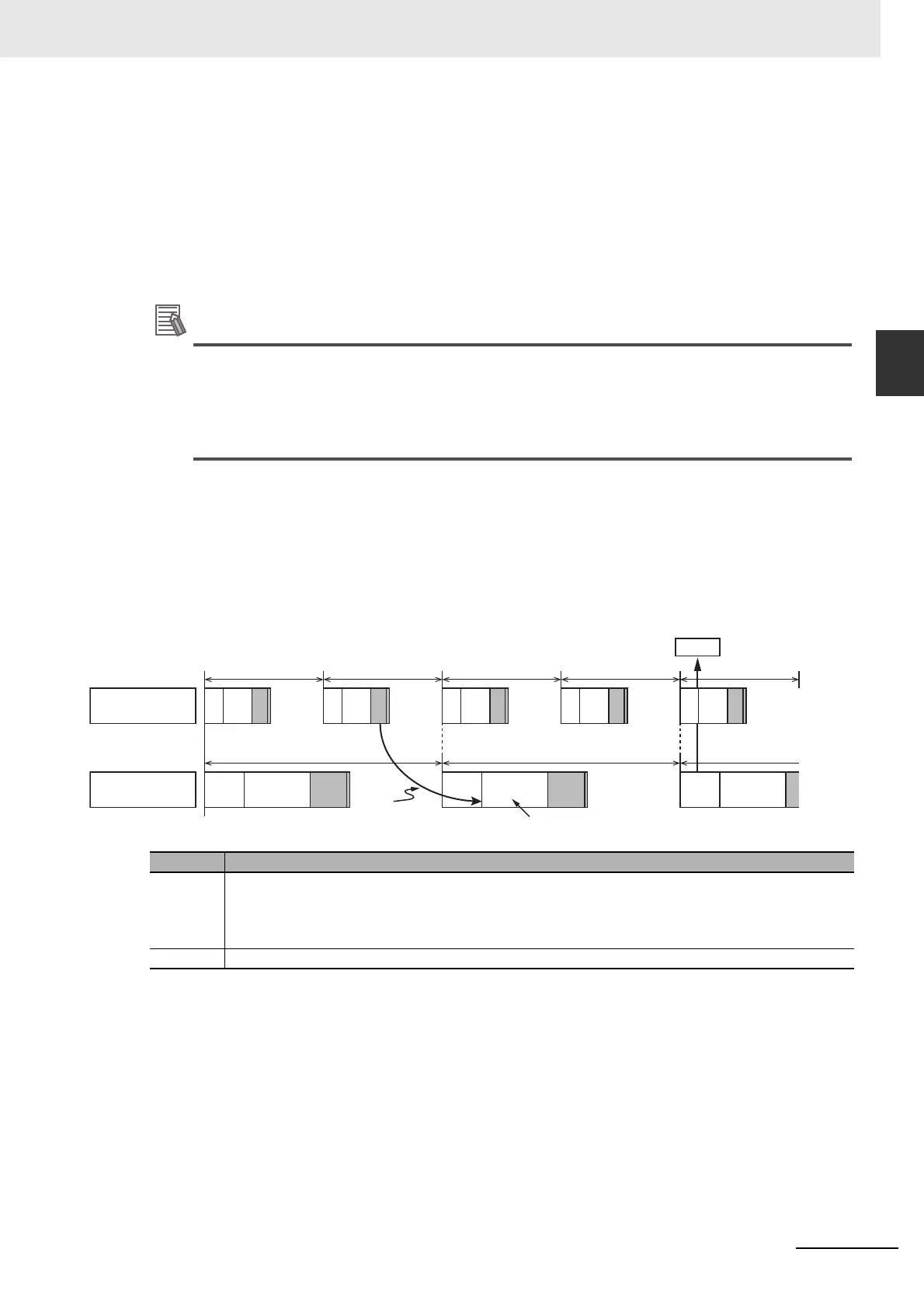
The timing that the values of an Axis Variable in the primary periodic task update to the priority-5
periodic task is shown below.
Symbol Description
(A) Axis Variable updated.
Regardless of where the user program execution for the priority-5 periodic task starts, the execution
results from the primary periodic task immediately before the start of the task periods matched are
updated.
(B) The values of an Axis Variable are not written during the user program execution.
IO UPG
MC
IO UPG
MC
IO UPG
MC
IO UPG
MC
Task period (t×2)
IO UPG MC IO UPG MC IO UPG
(A)
(B)
IO UPG
MC
Servo
Execution command
Primray
periodic task
Priority-5
periodic task
Primray period (t)
 Loading...
Loading...








