Center of gravity CX, CY, CZ: set the location of the center of gravity of the workpiece.
6.1.6. SG
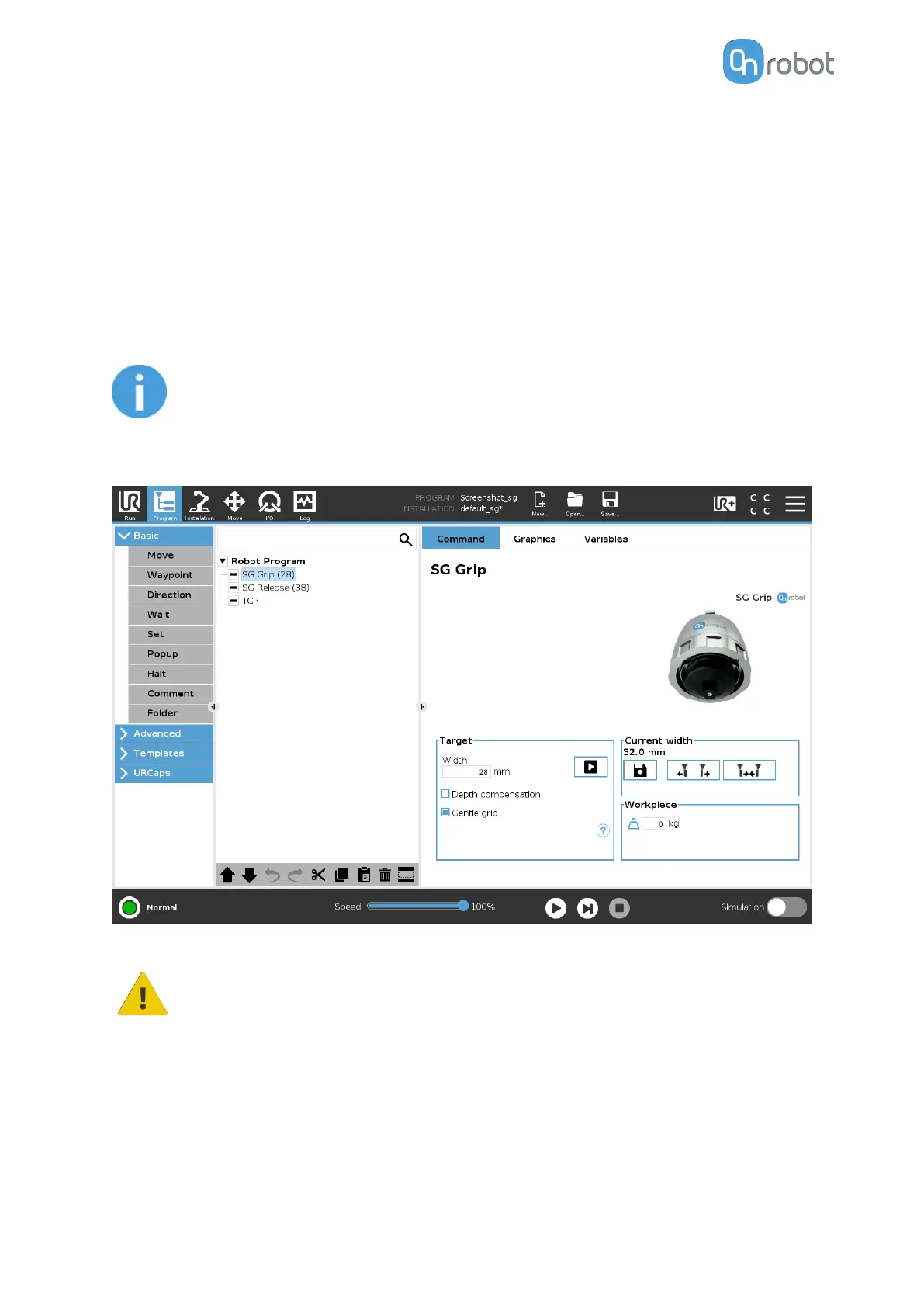
SG Grip / SG Release
The SG Grip/SG Release command is used to grip or release a workpiece.
When the SG Grip/SG Release command is executed, the gripper will try to reach the
specified target Width, moving by the default Gentle grip speed, and if selected, Depth
compensation. The dierent functions are explained below.
NOTE:
The gripper first needs to be initialized, otherwise “Program is not finished”
error message can appear. In this case open the Toolbar and click on the
Initialize button.
WARNING:
When working with the SG, please make sure that the grippers inward/outward
motion is not obstructed, otherwise the positioning system may get out of sync.
If that were to happen, move the grip/release point away from the workpiece,
and reinitialize the gripper.
The command name in the robot program shows a number in brackets that represent the
target width. If two SG gripper are used, a number in squared bracket will show what gripper
performs the action.
OPERATION
107