These are open and close hold-to-run buttons.
Workpiece
the workpiece weight can be entered. The URCap software will then perform the
calculation of the resulting payload mass considering the gripper, the Quick Changer, and the
workpiece mass.
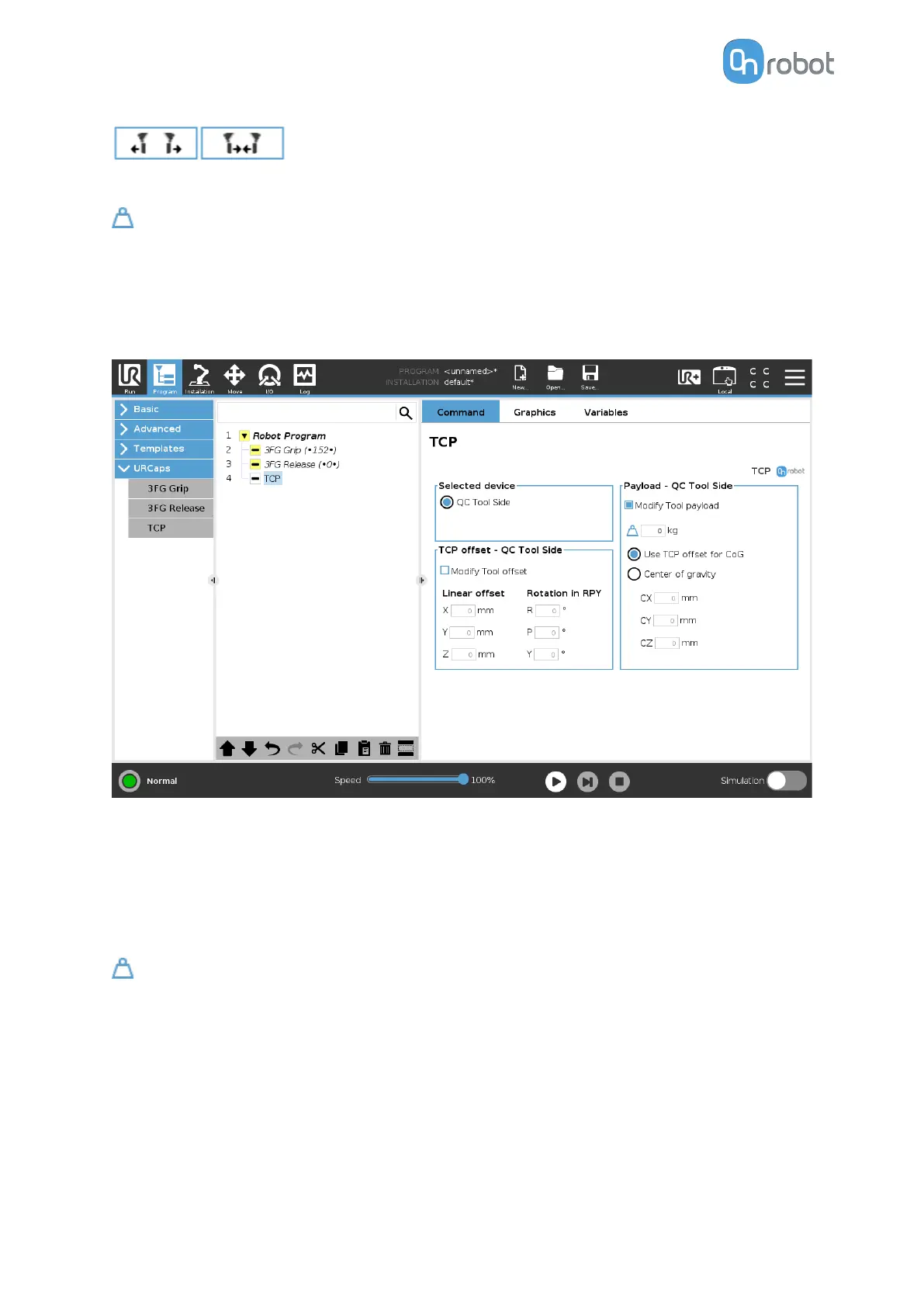
TCP
The TCP command is used to set the current TCP and/or payload for the robot.
TCP
oset
Set the Linear oset (X,Y,Z) and the Rotation in RPY (Roll-Pitch-Yaw) values to adjust the
OnRobot device dependent calculated TCP.
Payload
Modify Tool payload: If enabled the UR's payload will be overwritten.
enter the workpiece mass that is attached to the device. The device own mass is added
automatically.
Use TCP oset for CoG: set the center of gravity of the workpiece at the active TCP position.
Center of gravity CX, CY, CZ: set the location of the center of gravity of the workpiece.
6.1.7. VG10/VGC10
VG Grip
This command is used to activate the pump and generate vacuum to grip a workpiece.
OPERATION
109