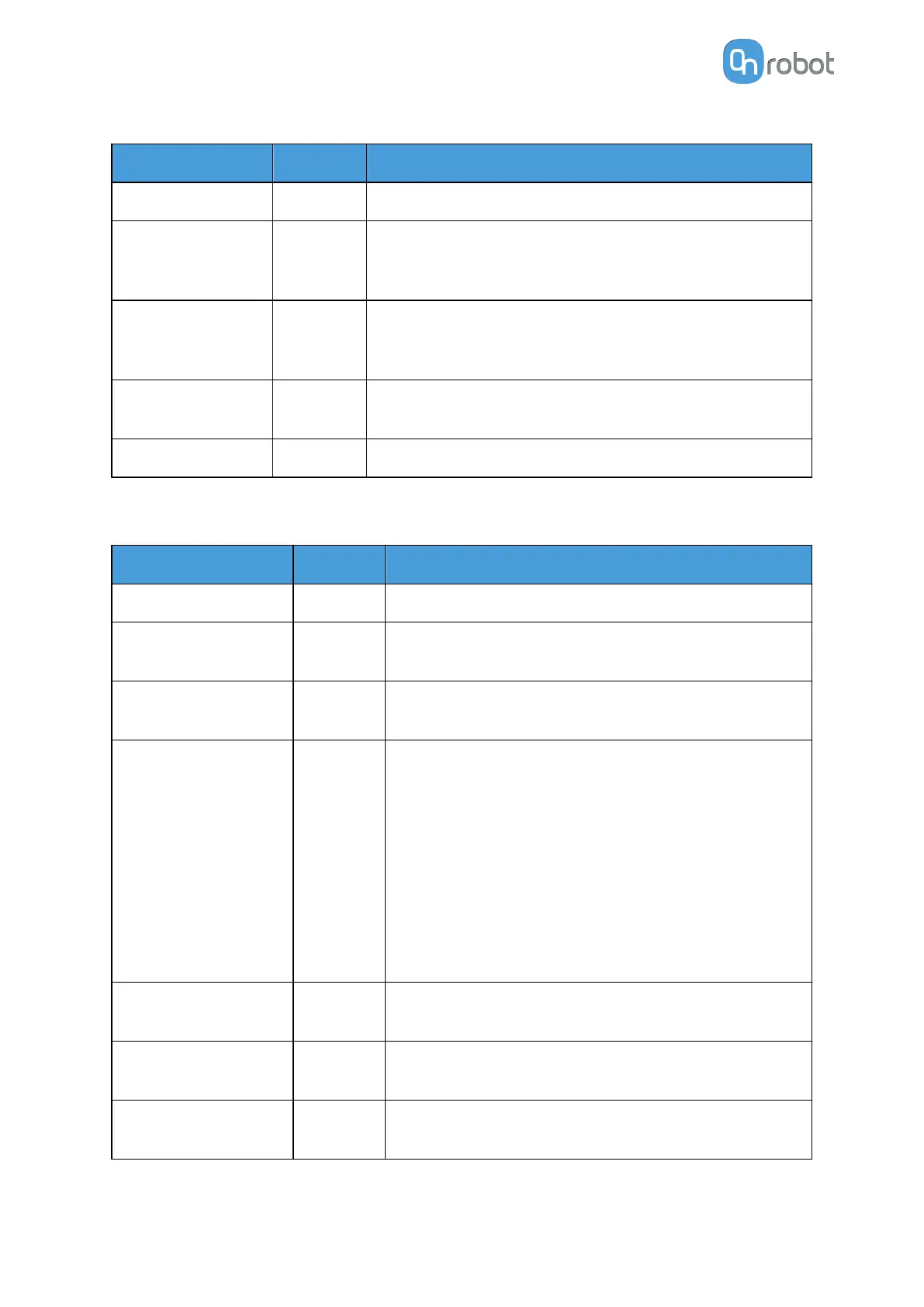
Feedback Variable Unit Description
rg_Busy True/false Whether the gripper is active or not
rg_Depth [mm] Distance the robot (due to depth compensation) has
moved towards the z axes having as reference the
gripper at 0 mm width
rg_DepthRel [mm] Distance the robot (due to depth compensation) has
moved towards the z axes having as reference the
previous gripper's width
rg_Grip_detected True/
False
True if Gripper has detected a workpiece
rg_Width [mm] Width between the fingers of the Gripper
6.6.5. Screwdriver
Feedback Variable
Unit Description
on_return -1 xmlrpc command failed
d_Achieved_torque Nm Achieved torque after a Tighten command has been
executed
sd_Busy True/
False
True if the Screwdriver is active
sd_Command_results 0 - No additional result data
1 - Unknown command
2 - Not screwing in
3 - Timeout waiting for torque
4 - Torque exceeded prematurely
5 - Unable to loosen screw
6 - Shank reached the end
7 - Shank obstructed during move
sd_Current_torque
Nm Current torque the Screwdriver is applying at the
moment
sd_Process_NOK True/
False
True if the command was not executed correctly
sd_Process_OK True/
False
True if the command was executed correctly
OPERATION
139