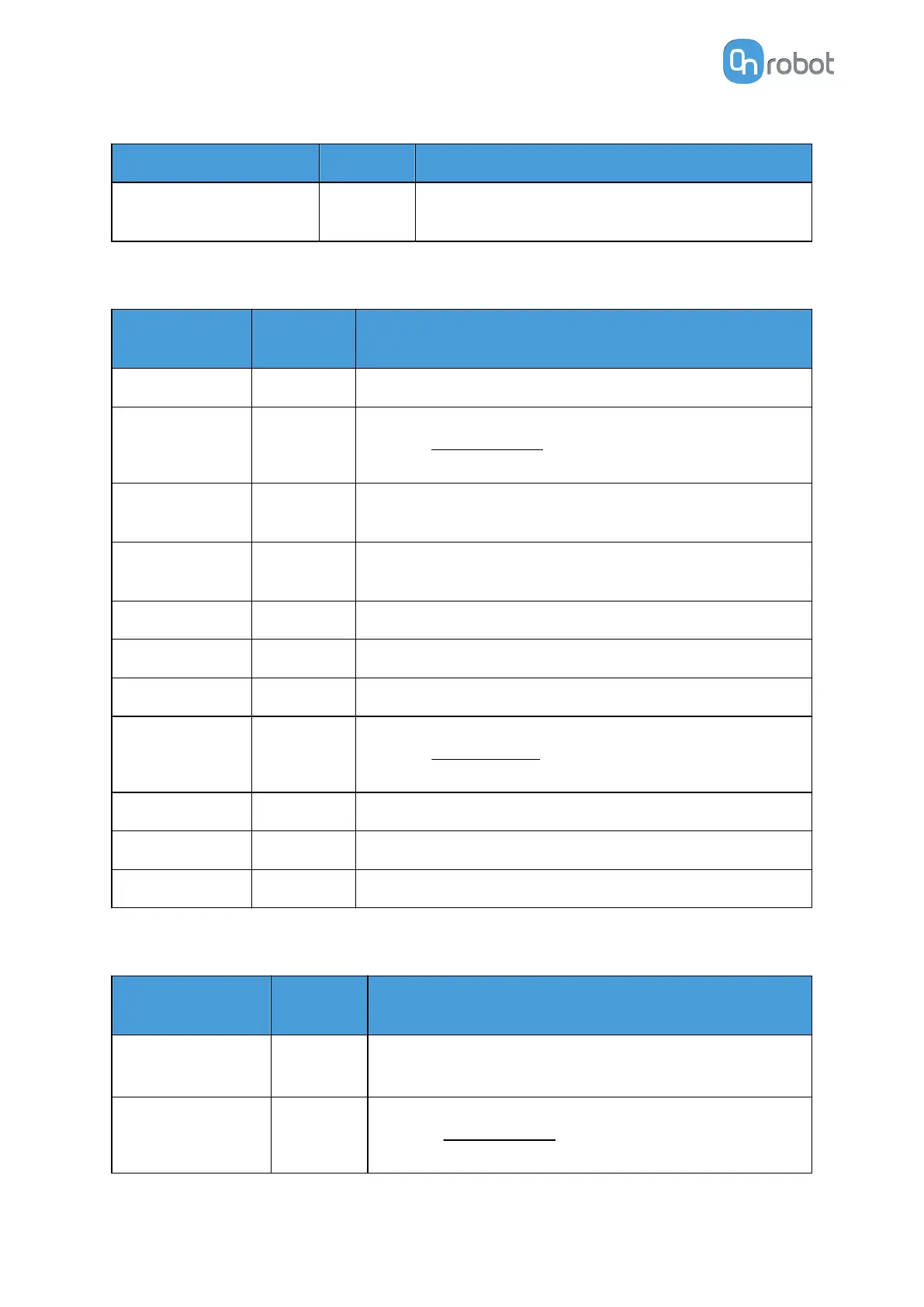
Feedback Variable Unit Description
tfg_Force_Grip_detected True/False True if Gripper has done a grip with the target
force
6.6.2. HEX-E/H QC
Feedback
Variable
Unit Description
on_return The return value for the OnRobot commands
F3D [N] Length of the 3D force vector
F3D = √ Fx² + Fy² + Fz²
FT_Base [3xN,3xNm] Force and torque values calculated in the Base Coordinate
system, in an array
FT_Tool [3xN,3xNm] Force and torque values calculated in the Tool Coordinate
system, in an array
Fx [N] Force value along the X axis
Fy [N] Force value along the Y axis
Fz [N] Force value along the Z axis
T3D [Nm] Length of the 3D torque vector
T3D = √ Tx² + Ty² + Tz²
Tx [Nm] Torque value about the X axis
Ty [Nm] Torque value about the Y axis
Tz [Nm] Torque value about the Z axis
6.6.3. RG2-FT
Feedback
Variable
Unit Description
on_return The return value for the OnRobot commands
F3D [N] Length of the 3D force vector
F3D = √ Fx² + Fy² + Fz²
OPERATION
137