8. Hardware Specification
8.1. Technical Sheets
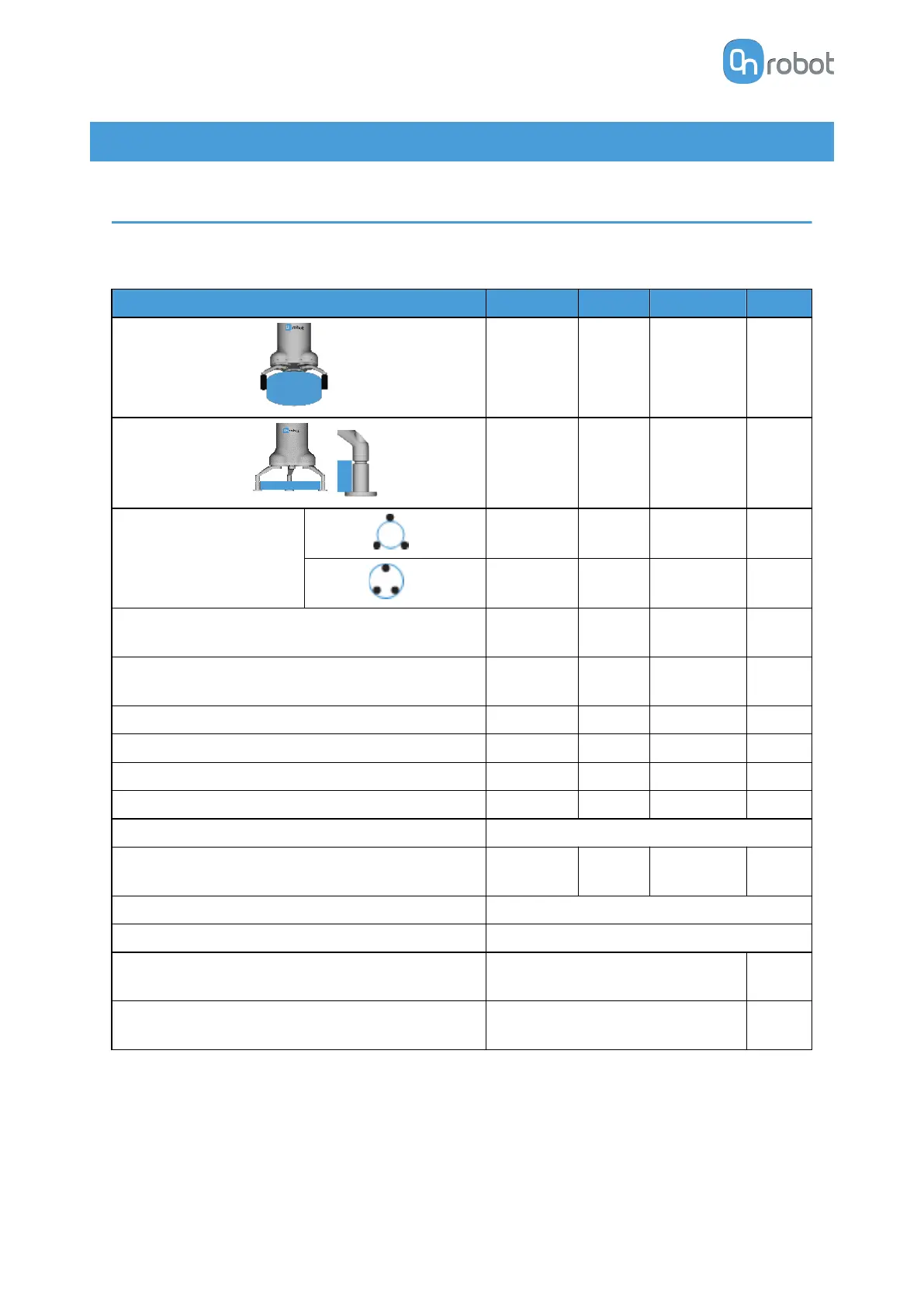
8.1.1. 3FG15
General Properties Minimum Typical Maximum Unit
Payload Force Fit
-
-
-
-
10
22
[kg]
[lb]
Payload Form Fit
-
-
-
-
15
33
[kg]
[lb]
Grip Diameter*
External
4
0.16
-
-
152
5.98
[mm]
[inch]
Internal
35
1.38
-
-
176
6.93
[mm]
[inch]
Finger position resolution -
-
0.1
0.004
-
-
[mm]
[inch]
Diameter repetition accuracy -
-
0.1
0.004
0.2
0.007
[mm]
[inch]
Gripping force 10 - 240 [N]
Gripping force (adjustable) 1 - 100 [%]
Gripping speed (diameter change) - - 125 [mm/s]
Gripping time (including brake activation)** - 500 - [ms]
Hold workpiece if power loss? Yes
Storage temperature 0
32
-
-
60
122
[°C]
[°F]
Motor Integrated, electric BLDC
IP Classification IP67
Dimensions [L, W, Ø] 156 x 158 x 180
6.14 x 6.22 x 7.08
[mm]
[inch]
Weight 1.15
2.5
[kg]
[lb]
* With the scope of delivery
** 10 mm diameter distance. Also see section Finger Movement and Force
HARDWARE SPECIFICATION
164